



















20 Applied Instructions (Positioning Control)
20.5 ZRN / Zero Return
527
FXCPU Structured Programming Manual
[Basic & Applied Instruction]
11
Applied Instructions
(Data Operation)
12
Applied Instructions
(High Speed
Processing)
13
Applied Instructions
(Handy
Instruction)
14
Applied Instructions
(External FX I/O
Device)
15
Applied Instructions
(External Device
(optional device))
16
Applied Instructions
(External Device)
17
Applied Instructions
(Data Transfer 2)
18
Applied Instructions
(Floating Point)
19
Applied Instructions
(Data Operation 2)
20
Applied Instructions
(Positioning
Control)
20.5 ZRN / Zero Return
Outline
This instruction matches the mechanical position and the current value register in the PLC by zero return.
Please use DSZR when DOG search function is necessary.
→ As for explanation of the instruction, see the positioning control manual.
→ As for cautions of use of high speed output special adapter, see the positioning control manual.
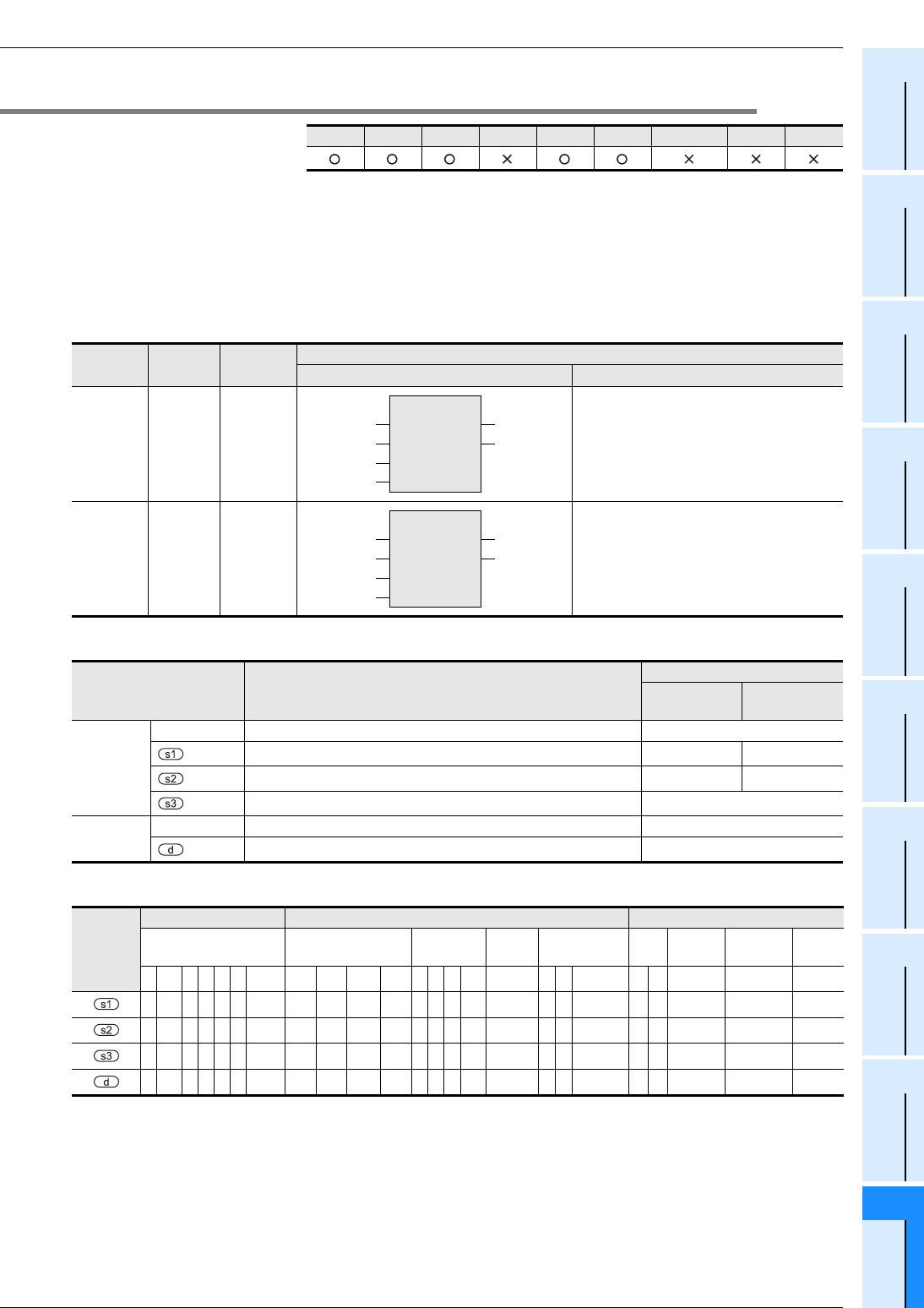
1. Format and operation, execution form
2. Set data
3. Applicable devices
S: Refer to "Cautions".
FX3U(C) FX3G(C) FX3S FX2N(C) FX1N(C) FX1S FXU/FX2C FX0N FX0(S)
Instruction
name
Operation
Execution
form
Expression in each language
Structured ladder/FBD ST
ZRN 16 bits Continuous ZRN(EN,s1,s2,s3,d);
DZRN 32 bits Continuous DZRN(EN,s1,s2,s3,d);
Variable Description
Data type
16-bit
operation
32-bit
operation
Input
variable
EN Execution condition Bit
Speed when starting to zero return ANY16 ANY32
Creep speed ANY16 ANY32
Device for entering the near-point signal (DOG) Bit
Output
variable
ENO Execution state Bit
Device for issuing pulse Bit
Operand
type
Bit Devices Word Devices Others
System user Digit designation
System
user
Special
unit
Index
Cons
tant
Real
Number
Character
String
Pointer
XYMTCS
D
.b
KnX KnY KnM KnS T C D R
U\G
VZModifierKH E
""
P
zzzzzzz
S3 S2
zz z z z
zzzzzzz
S3 S2
zz z z z
zzz z
S1
z
S4
z
ZRN
EN
s1
ENO
d
s2
s3
DZRN
EN
s1
ENO
d
s2
s3