



















Appendix - 81
MELSEC-Q
APPENDICES
MOVEMENT AMOUNT PER PULSE
When using mm, inch, or degree units, the
movement amount is calculated and output
from the machine side showing how much the
motor shaft moves per pulse. Positioning
accuracy in smaller units is not possible.
On the motor side, the movement amount per
axis rotation is normally designed as a
reference, so it is calculated as follows.
Movement amount per pulse =
P rate
No. of pulses per
encoder rotation
×
Movement amount
per rotation
Amount the motor moves (travel) per pulse.
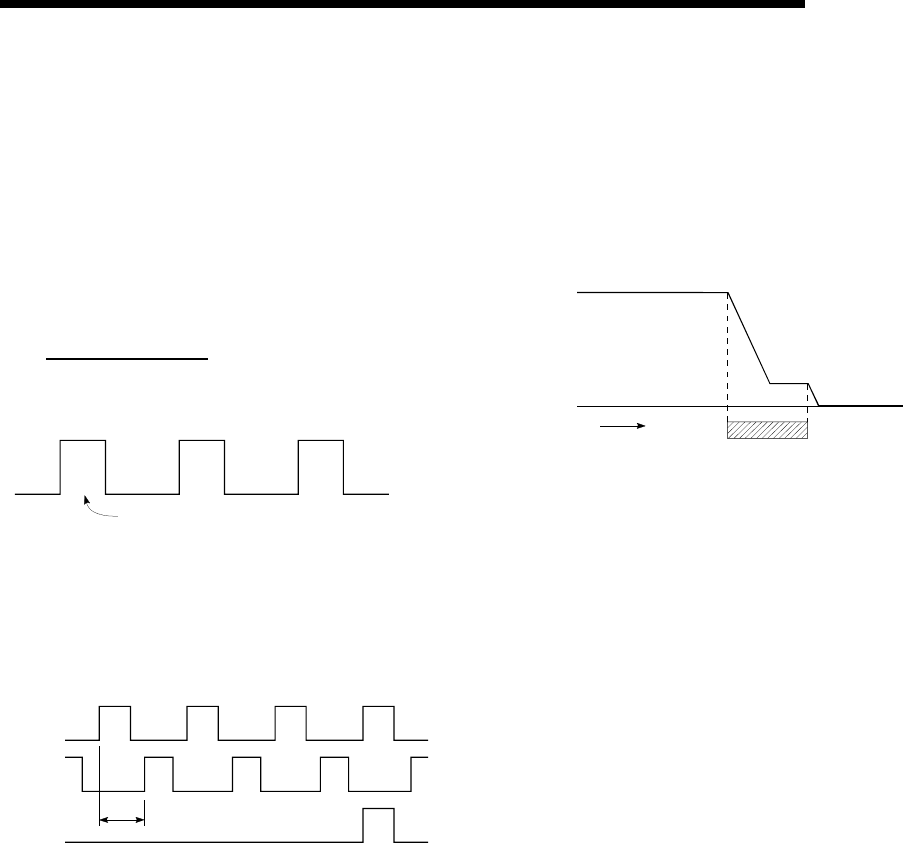
MULTI-PHASE PULSE
A combination of pulses in which 2 or more
phases differ.
2-phase pulses, etc.
A
phase
Phase difference
B phase
Z
phase
(ZERO signal)
MULTIPLYING RATE SETTING
The P rate. Refer to the term "P RATE".
NC LANGUAGE (Numerical Control
Language)
This is the language punched into the paper
tape that instructs the machining to the NC
module.
The NC language consists of EIA codes (EIA
language), ISO codes (ISO standards), and
JIS codes (JIS standards).
NEAR-POINT DOG
This is a switch placed before the OP. When
this switch turns ON, the feedrate is changed
to the creep speed. Because of that, the time
that this switch is ON must be long enough to
allow for the time required for deceleration
from the feedrate to the creep speed.
ON OFF
Feedrate
Creep speed
Time
Near-point dog
NEW CURRENT VALUE (CURRENT VALUE
CHANGING)
The QD75 has no way of knowing the current
value when the machine is assembled and the
positioning module is connected, so this
function is used to teach it a temporary
approximate value as the current value. This
function can also be used to write a temporary
current value when the current value has been
lost due to accidents, etc. If an OPR is carried
out after that, the positioning module will
recognize the zero point.
To prevent the accumulated value from
exceeding the stroke limit in fixed-feed, etc.,
rewrite the current value to 0 after the fixed-
feed. The current value can be changed during
a positioning stop.