


















5 - 29
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
1) The backlash compensation is valid after machine OPR. Thus, if the backlash
compensation amount is set or changed, always carry out machine OPR once.
2) The backlash compensation amount setting range is 0 to 65535, but it should
be set to 255 or less by using the following expression.
Backlash compensation amount
0
≤
Movement amount per pulse
≤
255
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
0 to 6553.5 (
µ
m)
0 to 65535 (
×
10
-1
µ
m)
1 : inch 0 to 0.65535 (inch)
0 to 65535 (
×
10
-5
inch)
2 : degree 0 to 0.65535 (degree)
0 to 65535 (
×
10
-5
degree)
3 : pulse 0 to 65535 (pulse) 0 to 65535 (pulse)
1 to 32767 : Set as a decimal
32768 to 65535 : Convert into hexadecimal and set
[Table 2]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
-214748364.8 to 214748364.7 (
µ
m)
-2147483648 to 2147483647 (
×
10
-1
µ
m)
1 : inch -21474.83648 to 21474.83647(inch)
-2147483648 to 2147483647 (
×
10
-
5
inch)
2 : degree 0 to 359.99999 (degree)
0 to 35999999 (
×
10
-5
degree
)
3 : pulse -2147483648 to 2147483647(pulse) -2147483648 to 2147483647 (pulse)
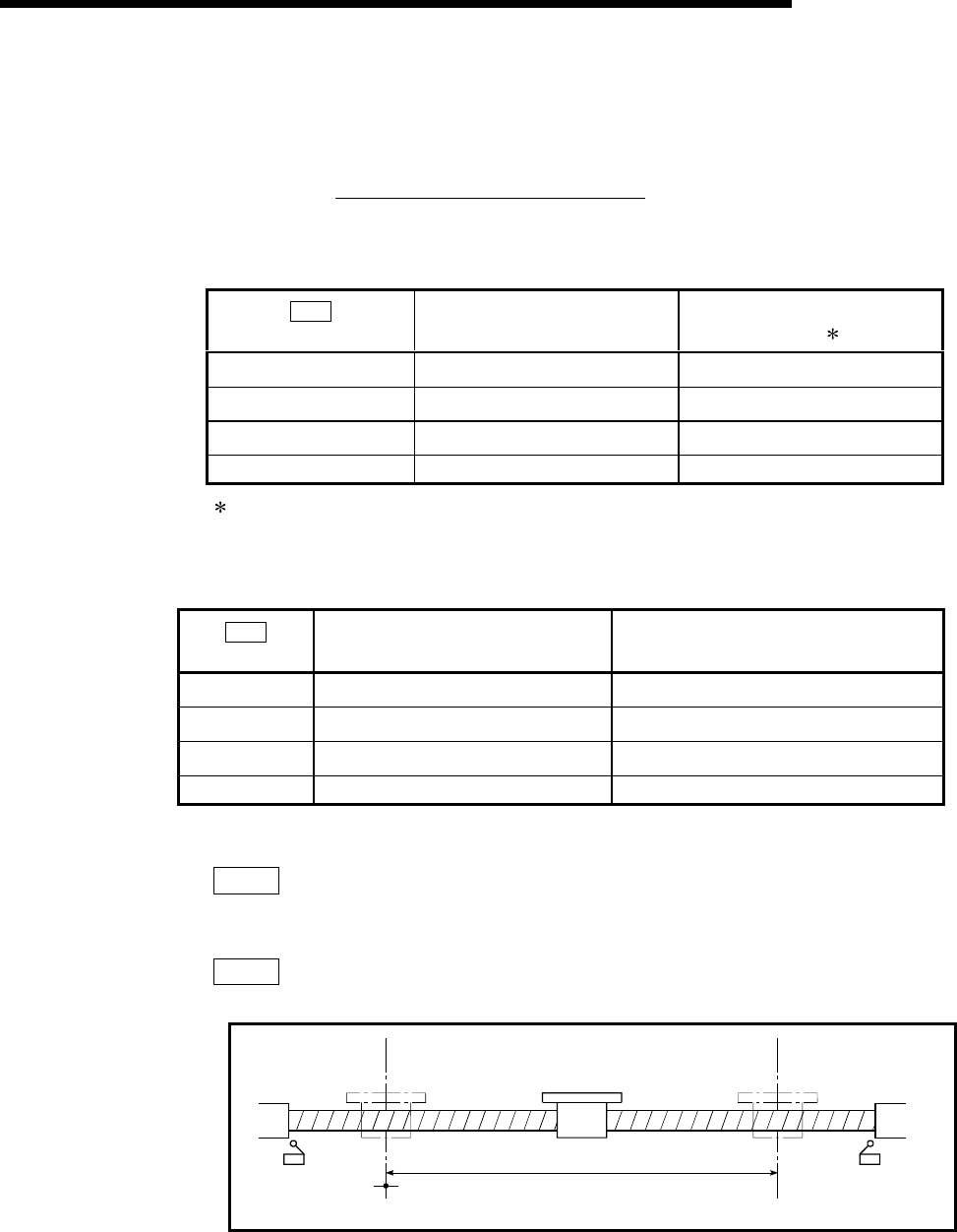
Pr.12
Software stroke limit upper limit value
Set the upper limit for the machine's movement range during positioning control.
Pr.13
Software stroke limit lower limit value
Set the lower limit for the machine's movement range during positioning control.
Software stroke
limit lower limit
Software stroke
limit upper limit
OP
(Machine movement range)
Emergency stop
limit switch
Emergency stop
limit switch