


















15 - 35
MELSEC-Q
15 TROUBLESHOOTING
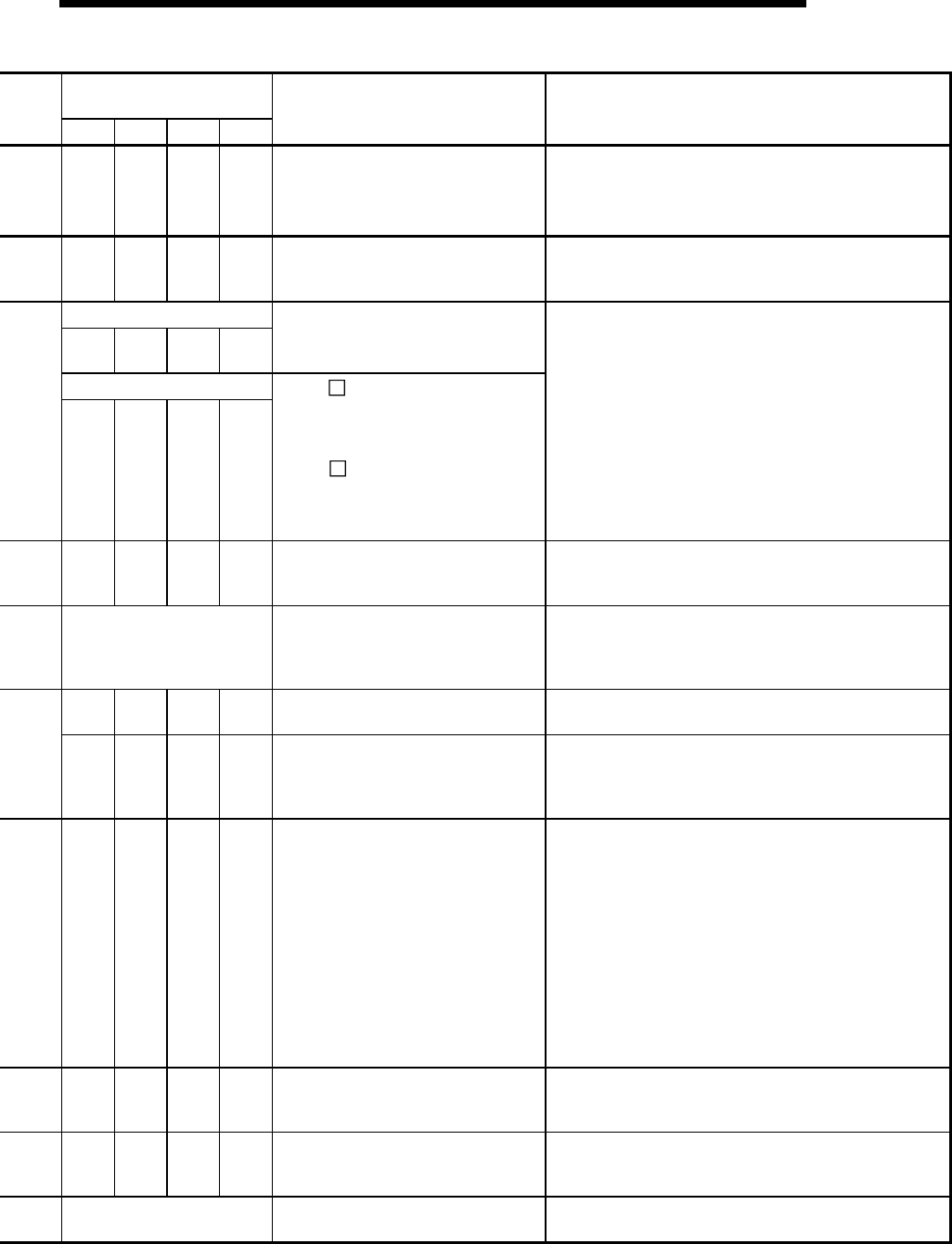
Related buffer memory
address
Axis 1 Axis 2 Axis 3 Axis 4
Set range
(Setting with sequence program)
Remedy
1522
1523
1622
1623
1722
1723
1822
1823
<Manual pulse generator 1 pulse
input magnification>
1 to 100
Set the manual pulse generator 1 pulse input
magnification to within the setting range.
1516 1616 1716 1816
<Speed change request>
1: Speed change is requested
Do not carry out the speed change during deceleration
with a stop command, during stoppage, or during
automatic deceleration with position control.
New speed value
1514
1515
1614
1615
1714
1715
1814
1815
0 to 1000000 [pulse/s]
0 to 2000000000 [mm/min or another]
Speed limit value
10
11
160
161
310
311
460
461
QD75P
:
1 to 200000 [pulse/s]
1 to 2000000000
[mm/min or another]
QD75D
:
1 to 1000000 [pulse/s]
1 to 2000000000
[mm/min or another]
Set the new speed value to a range of 0 to "speed limit
value".
1504 1604 1704 1804
<M code OFF request>
1: M code ON signal is turned OFF
Normalize the ON and OFF timings of the "M code
OFF request". (Refer to Section 12.7.3)
Refer to Section 5.3
"List of positioning data"
<Operation pattern>
00: Positioning complete
01: Continuous positioning control
11: Continuous path control
Set the operation termination to the 50th point.
(Refer to Chapter 10)
———— —
Make 1 nest construction for FOR to NEXT.
(Refer to Section 10.3.8)
———— —
Do not turn ON the speed-position switching signal
during acceleration.
(Refer to Section 9.2.16)
———— —
Give a request at the position where there is an
enough remaining distance.
1546 1646 1746 1846
<Step start information>
1: Step is continued
2: Re-start is carried out
Do not set a "1" to the step start information when the
step is not in standby state. (Refer to Section 12.7.1)
62 212 362 512
<External command function
selection>
0, 1, 2, 3
Set the detailed parameter 2 "External command
function selection" to within the setting range.
Refer to Section 5.3
"List of positioning data"
—
Set a decelerating address or a movement amount to
the positioning data.