
















5 - 60
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
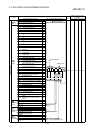
Setting value
Setting value buffer memory
address
Item
Value set with peripheral device Value set with sequence program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
00:Positioning complete 00
01:Continuous positioning control 01
Da.1
Operation
pattern
11:Continuous path control 11
ABS1 :1-axis linear control (ABS) 01
H
INC1 :1-axis linear control (INC) 02
H
FEED1:1-axis fixed-feed control 03
H
VF1 :1-axis speed control (forward run) 04
H
VR1 :1-axis speed control (reverse run) 05
H
VPF :Speed-position switching control (forward
run)
06
H
VPR :Speed-position switching control (reverse
run)
07
H
PVF : Position-speed switching control (forward
run)
08
H
PVR :Position-speed switching control (reverse
run)
09
H
ABS2 :2-axis linear interpolation control (ABS) 0A
H
INC2 :2-axis linear interpolation control (INC) 0B
H
FEED2:Fixed-feed control by 2-axis linear
interpolation
0C
H
ABS
(
:Circular interpolation control with sub point
specified (ABS)
0D
H
INC
(
:Circular interpolation control with sub point
specified (INC)
0E
H
ABS . :Circular interpolation control with center
point specified (ABS, CW)
0F
H
ABS . :Circular interpolation control with center
point specified (ABS, CCW)
10
H
INC . :Circular interpolation control with center
point specified (INC, CW)
11
H
INC . :Circular interpolation control with center
point specified (INC, CCW)
12
H
VF2 :2-axis speed control (forward run) 13
H
VR2 :2-axis speed control (reverse run) 14
H
ABS3 :3-axis linear interpolation control (ABS) 15
H
INC3 :3-axis linear interpolation control (INC) 16
H
FEED3:Fixed-feed control by 3-axis linear
interpolation control
17
H
VF3 :3-axis speed control (forward run) 18
H
VR3 :3-axis speed control (reverse run) 19
H
ABS4 :4-axis linear interpolation control (ABS) 1A
H
INC4 :4-axis linear interpolation control (INC) 1B
H
FEED4:Fixed-feed control by 4-axis linear
interpolation control
1C
H
VF4 :4-axis speed control (forward run) 1D
H
VR4 :4-axis speed control (reverse run) 1E
H
NOP :NOP instruction 80
H
POS :Current value changing 81
H
JUMP :JUMP instruction 82
H
LOOP :Declares the beginning of LOOP to LEND
section
83
H
Da.2
Control
system
LEND :Declares the end of LOOP to LEND
section
84
H
0:
Pr.9
Acceleration time 0 00
1:
Pr.25
Acceleration time 1 01
2:
Pr.26
Acceleration time 2 10
Da.3
Acceleration
time No.
3:
Pr.27
Acceleration time 3 11
0:
Pr.10
Deceleration time 0 00
1:
Pr.28
Deceleration time 1 01
2:
Pr.29
Deceleration time 2 10
Da.4
Deceleration
time No.
3:
Pr.30
Deceleration time 3 11
0: Axis1 00
1: Axis 2 01
2: Axis 3 10
Positioning identifier
Da.5
Axis to be
interpolated
3: Axis 4 11
Setting value
Control system
Operation pattern
Acceleration
time
Deceleration time
H
b15 b12 b8 b4 b0
Convert into
hexadecimal
Axis to be interpolated
(in 2-axis interpolation only)
0000
H
2000 8000 14000 20000