


















15 - 34
MELSEC-Q
15 TROUBLESHOOTING
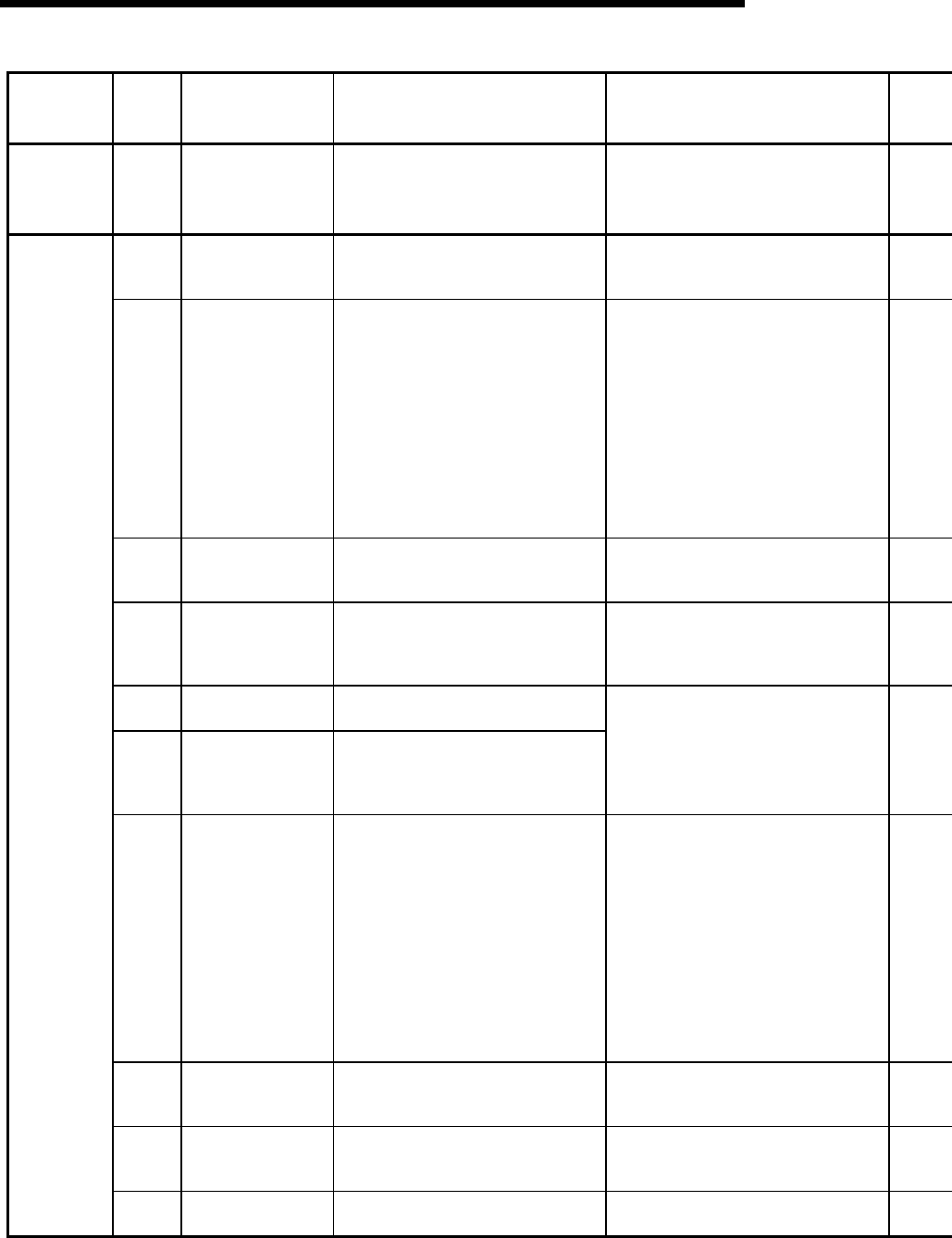
Classification
of warnings
Warning
code
Warning name Warning
Operation status at warning
occurrence
Manual pulse
generator
401
Outside manual
pulse generator
input magnification
range
The manual pulse generator 1 pulse
input magnification is set at 0 or 101
or higher.
• When input magnification is set at
101 or higher: Re-set to 100.
• When input magnification is set at 0:
Re-set to 1.
500
Deceleration/stop
speed change
The speed change request is issued
during deceleration stop.
The speed change is not carried out.
501
Speed limit value
over
The new value exceeds the speed
limit value when the speed is
changed during operation.
• The speed is controlled with the
speed limit value.
• The "speed limiting flag" is turned
ON.
503
M code ON signal
ON start
The M code ON signal is turned ON
when the positioning data is
executed.
Continue executing the positioning
data.
505
No operation
termination setting
In the positioning by block starting,
the 50th point of the positioning start
data is set to CONTINUE.
The operation is terminated.
506
FOR to NEXT nest
construction
FOR to NEXT is nested.
508
Speed-position
switching (during
acceleration) signal
ON
The switching signal for speed-
position switching control (INC
mode) is turned ON during
acceleration.
The operation is continued.
509
Insufficient
remaining distance
• At a continuous operation interrupt
request, the distance required
deceleration stop is not long
enough.
• At a speed change request, the
remaining distance is shorter than
the distance required for speed
change.
• When a command speed is
changed:
Change to a value as near a new
speed value as possible.
• When a target position is changed:
Adjust the speed to a value as
near the command speed as
possible, and then change to a
target position.
(When the operation pattern is a
continuous path control, ignore the
operations stated above.)
511 Step not possible
Code 1 is set for the step start
information when the step is outside
standby.
The step will not start.
512
Illegal external
command function
The detailed parameter 2 "External
command function selection" setting
range is exceeded.
Even if the external command signal
is turned ON, the system will not
perform anything.
Positioning
operation
513
Insufficient
movement amount
The movement amount is not large
enough for automatic deceleration.
The system stops immediately after it
reaches the positioning address.