


















5 - 37
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
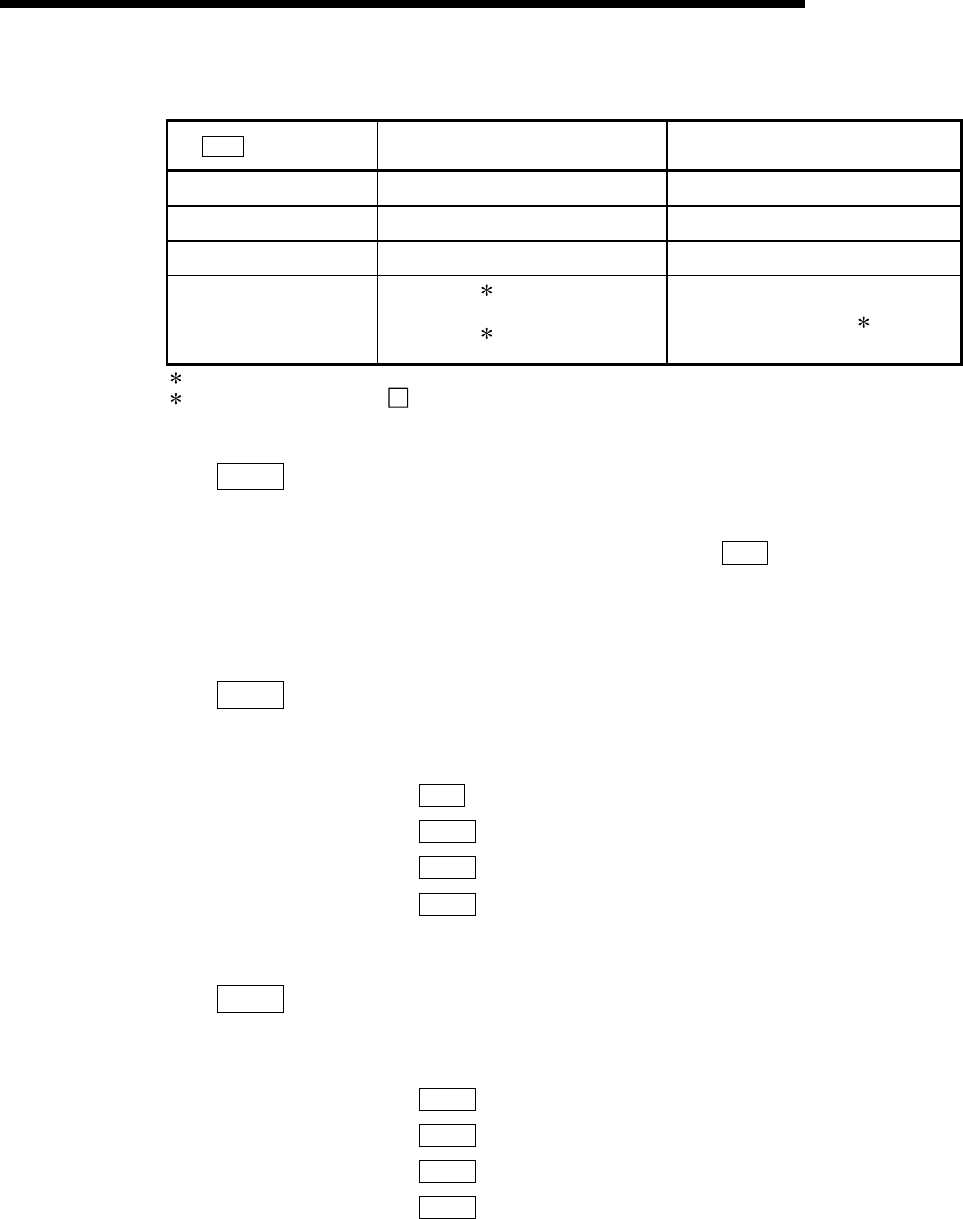
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm 0.01 to 20000000.00 (mm/min)
1 to 2000000000 (
×
10
-2
mm/min)
1 : inch 0.001 to 2000000.000 (inch/min)
1 to 2000000000 (
×
10
-3
inch/min)
2 : degree 0.001 to 2000000.000 (degree/min)
1 to 2000000000 (
×
10
-3
degree/min)
3 : pulse
[Select type
1 is QD75P]
1 to 200000 (pulse/s)
[Select type 1 is QD75D]
1 to 1000000 (pulse/s)
1 to 1000000 (pulse/s)
2
1: For Select type, refer to GX Configurator-QP Operating Manual "Section 11.1.2".
2: When using the QD75P (open collector output type), set the value to within "1 to 200000
(pulse/s)".
Pr.31
JOG speed limit value
Set the maximum speed for JOG operation.
Note)
•
Set the "JOG speed limit value" to less than "
Pr.8
Speed limit value".
If the "speed limit value" is exceeded, the "JOG speed limit value error"
(error code: 956) will occur.
Pr.32
JOG operation acceleration time selection
Set which of "acceleration time 0 to 3" to use for the acceleration time during JOG
operation.
0 : Use value set in "
Pr.9
Acceleration time 0".
1 : Use value set in "
Pr.25
Acceleration time 1".
2 : Use value set in "
Pr.26
Acceleration time 2".
3 : Use value set in "
Pr.27
Acceleration time 3".
Pr.33
JOG operation deceleration time selection
Set which of "deceleration time 0 to 3" to use for the deceleration time during JOG
operation.
0 : Use value set in "
Pr.10
Deceleration time 0".
1 : Use value set in "
Pr.28
Deceleration time 1".
2 : Use value set in "
Pr.29
Deceleration time 2".
3 : Use value set in "
Pr.30
Deceleration time 3".