



















9 - 13
MELSEC-Q
9 MAJOR POSITIONING CONTROL
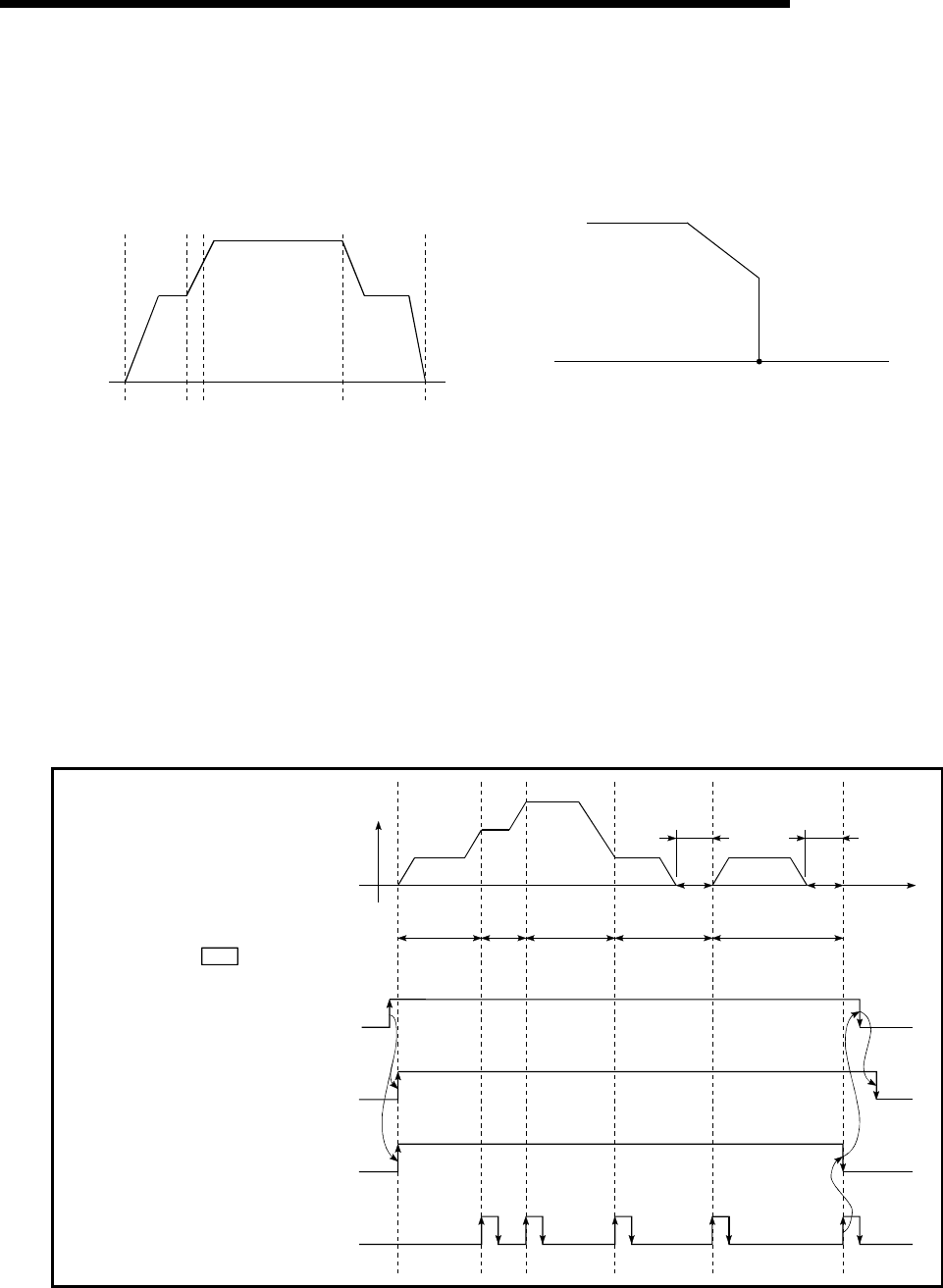
[When the speed cannot change over in P2]
When the relation of the speeds is P1 =
P4, P2 = P3, P1 < P2.
[When the movement amount is small during
automatic deceleration]
The movement amount required to carry out the
automatic deceleration cannot be secured, so the
machine immediately stops in a speed
≠
0 status.
P1 P2 P3 P4
Positioning address.
(b) Front-loading speed switching mode
1) If the respective command speeds differ in the "positioning data
currently being executed" and the "positioning data to carry out
the next operation", the speed will change over to the speed set in
the "positioning data to carry out the next operation" at the end of
the "positioning data currently being executed".
2) The parameters used in acceleration/deceleration to the
command speed set in the "positioning data to carry out the next
operation" are those of the positioning data to carry out
acceleration/deceleration.
Speed switching will not be carried out if the command speeds
are the same.
OFF
ON
OFF
ON
OFF
ON
OFF
ON
11 11 11 01
00
V
Dwell time
t
Da. 1 O
peration pattern
Start complete signal
BUSY signal
Positioning complete signal
Positioning start signal
Positioning
[Y10, Y11, Y12, Y13]
[X10, X11, X12, X13]
Dwell time
[XC, XD, XE, XF]
[X14, X15, X16, X17]
Fig. 9.5 Operation for the front-loading speed switching mode