

















5 - 62
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
Da.4
Deceleration time No.
Set which of "deceleration time 0 to 3" to use for the deceleration time during
positioning.
0 : Use the value set in "
Pr.10
Deceleration time 0".
1 : Use the value set in "
Pr.28
Deceleration time 1".
2 : Use the value set in "
Pr.29
Deceleration time 2".
3 : Use the value set in "
Pr.30
Deceleration time 3".
Da.5
Axis to be interpolated
Set the target axis (partner axis) for operations under the 2-axis interpolation
control.
0 : Selects the axis 1 as the target axis (partner axis).
1 : Selects the axis 2 as the target axis (partner axis).
2 : Selects the axis 3 as the target axis (partner axis).
3 : Selects the axis 4 as the target axis (partner axis).
Note)
•
Do not specify the own axis number or any number except the above.
(If you do, the "Illegal interpolation description command error" will
occur during the program execution (error code: 521).)
•
This item does not need to be set in case 3 or 4-axis interpolation is
selected.
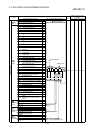
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Da.6
Positioning address/
movement amount
The setting value range differs according to the "
Da.2
Control
system".
Here, the value within the following range of [Table 1] range is set.
[Table 1] on right page
0
2006
2007
8006
8007
14006
14007
20006
20007
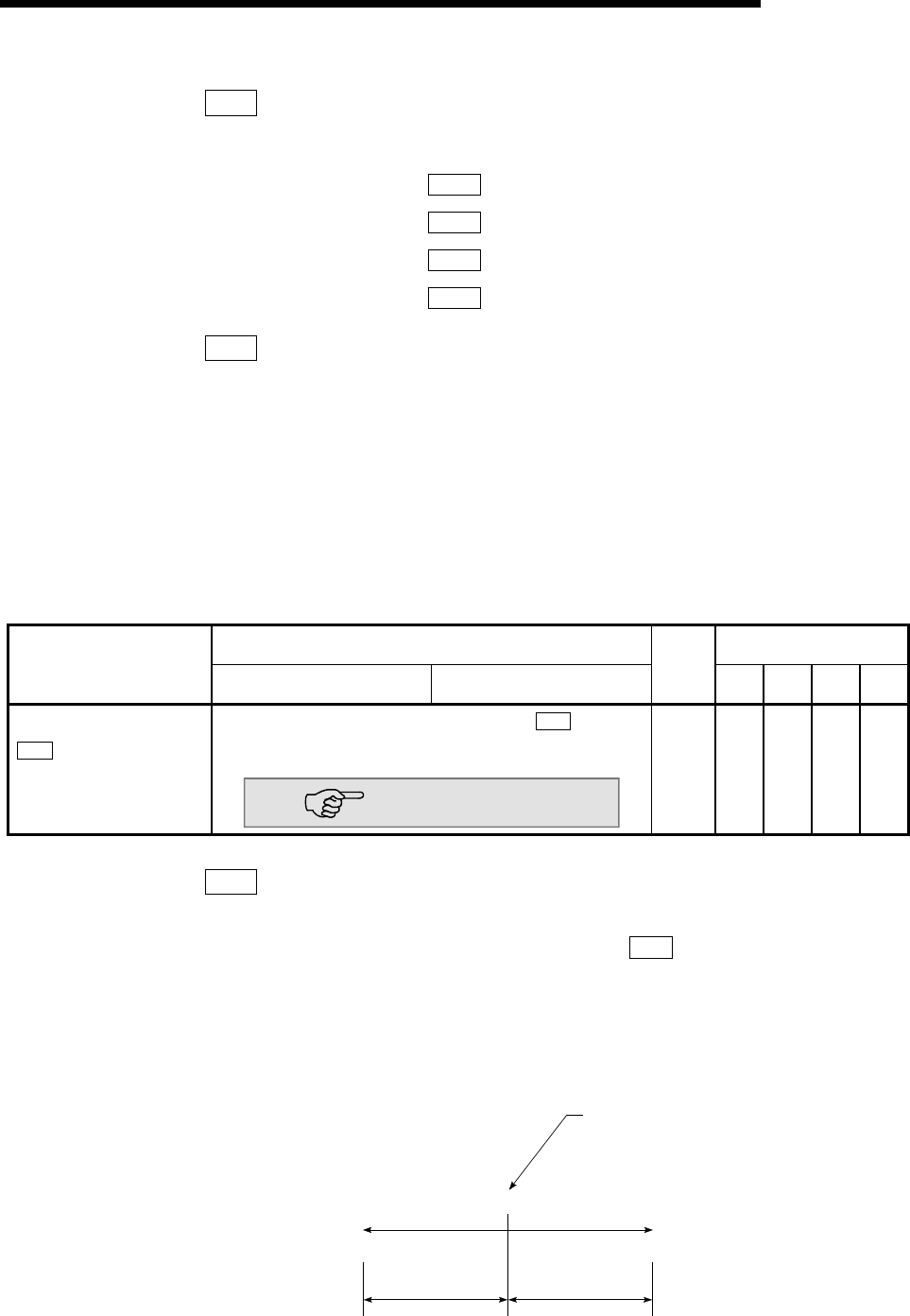
Da.6
Positioning address/movement amount
Set the address to be used as the target value for positioning control.
The setting value range differs according to the "
Da.2
Control system".
((1) to (4))
(1) Absolute (ABS) system, current value changing
•
The setting value (positioning address) for the ABS system and current value
changing is set with an absolute address (address from OP).
-1000 30001000
Stop position
(positioning start address)
Movement
amount : 2000
Movement
amount : 2000