


















5 - 36
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
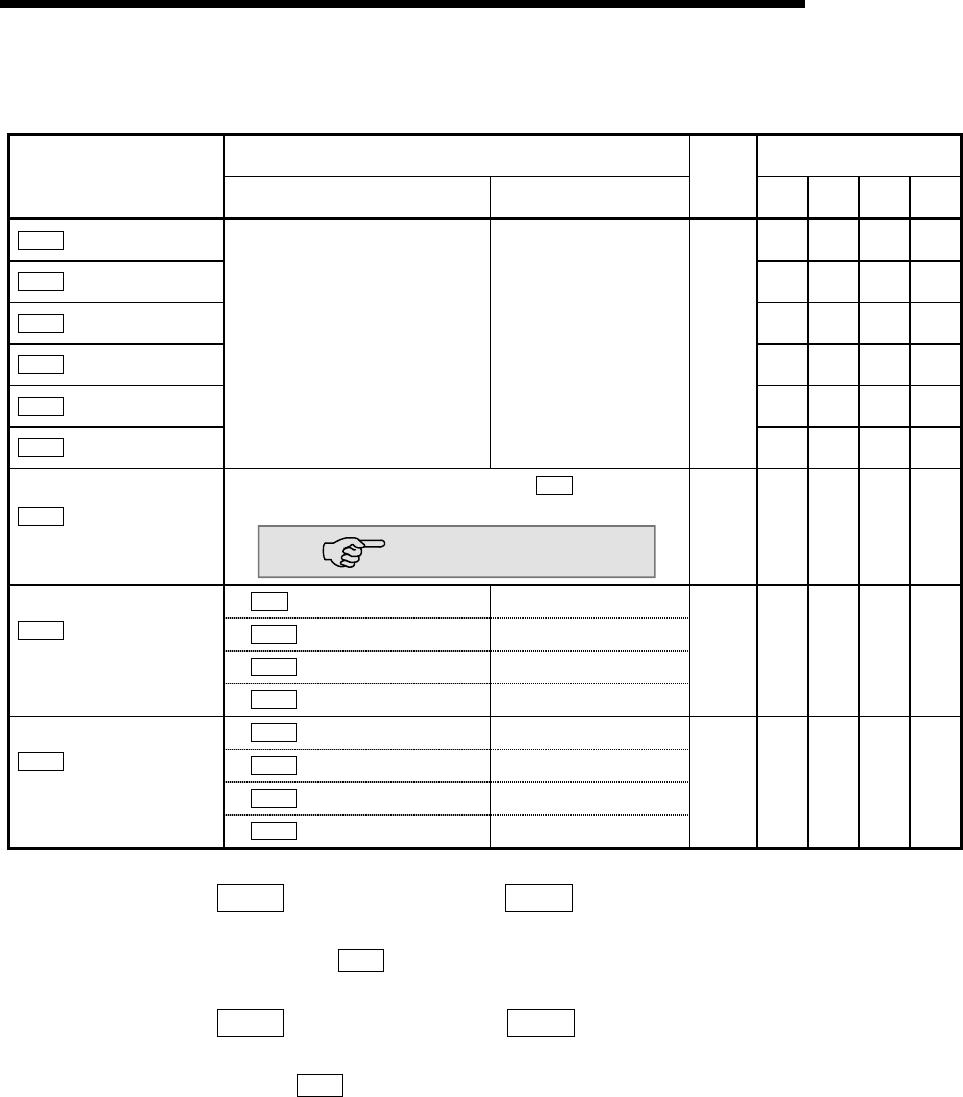
5.2.4 Detailed parameters 2
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.25
Acceleration time 1
36
37
186
187
336
337
486
487
Pr.26
Acceleration time 2
38
39
188
189
338
339
488
489
Pr.27
Acceleration time 3
40
41
190
191
340
341
490
491
Pr.28
Deceleration time 1
42
43
192
193
342
343
492
493
Pr.29
Deceleration time 2
44
45
194
195
344
345
494
495
Pr.30
Deceleration time 3
1 to 8388608 (ms) 1 to 8388608 (ms) 1000
46
47
196
197
346
347
496
497
Pr.31
JOG speed limit value
The setting range differs depending on the "
Pr.1
Unit setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
20000
48
49
198
199
348
349
498
499
0:
Pr.9
Acceleration time 0
0
1:
Pr.25
Acceleration time 1
1
2:
Pr.26
Acceleration time 2
2
Pr.32
JOG operation acceleration
time selection
3:
Pr.27
Acceleration time 3
3
0 50 200 350 500
0:
Pr.10
Deceleration time 0
0
1:
Pr.28
Deceleration time 1
1
2:
Pr.29
Deceleration time 2
2
Pr.33
JOG operation deceleration
time selection
3:
Pr.30
Deceleration time 3
3
0 51 201 351 501
Pr.25
Acceleration time 1 to
Pr.27
Acceleration time 3
These parameters set the time for the speed to increase from zero to the speed
limit value (
Pr.8
) during a positioning operation.
Pr.28
Deceleration time 1 to
Pr.30
Deceleration time 3
These parameters set the time for the speed to decrease from the speed limit
value (
Pr.8
) to zero during a positioning operation.