



















12 - 14
MELSEC-Q
12 CONTROL SUB FUNCTIONS
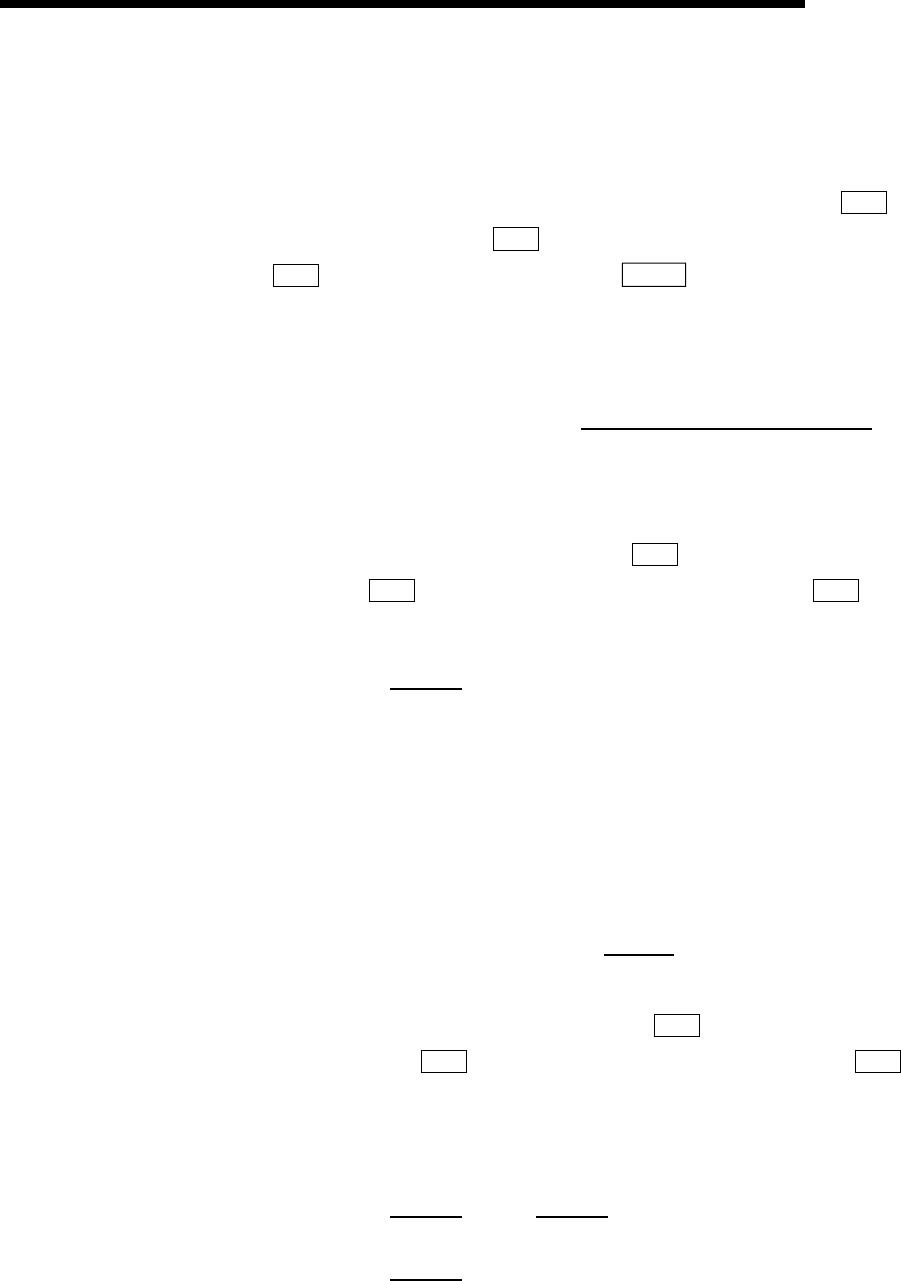
[1] Error compensation method
When position control is carried out by the "movement amount per pulse" set in
the QD75 parameters, an error sometimes occurs between the command
movement amount (L) and the actual movement amount (L').
That error is compensated in the QD75 by adjusting the values in "
Pr.2
No. of
pulses per rotation (Ap)", "
Pr.3
Movement amount per rotation (Al)", and
"
Pr.4
Unit magnification (Am)". (When " Pr.1 Unit setting" is "0: mm")
(1) Definition
The "error compensation amount" used to carry out the error compensation
is defined as follows.
Actual movement amount (L')
Error compensation amount =
Designated movement amount (L)
The QD75 "movement amount per pulse" is calculated with the following
equation.
Movement amount per pulse is "A", "
Pr.2
No. of pulses per rotation" is
(Ap), "
Pr.3
Movement amount per rotation" is (Al), and "
Pr.4
Unit
magnification" is (Am).
Al
A =
Ap
×
Am
(2) Procedure
(a) Set the "command movement amount (L)", and carry out positioning.
(Set the "movement amount per pulse (A)" according to Section 5.2
"List of parameters".)
(b) After positioning, measure the "actual movement amount (L')".
(c) Calculate the "error compensation amount".
L'
Error compensation amount =
L
(d) Calculate the post-compensation "
Pr.2
No. of pulses per rotation
(Ap')", "
Pr.3
Movement amount per rotation (Al')", and "
Pr.4
Unit
magnification (Am')" from the "post-compensation movement amount
per pulse (A')".
A = A
×
Error compensation amount
Al L'
=
Ap
×
Am
×
L
Al'
=
Ap'
×
Am'
(Adjust with Am' so that Al' and Ap' do not exceed the setting range.)