



















11 - 10
MELSEC-Q
11 MANUAL CONTROL
11.2.4 Creating start programs for JOG operation
A sequence program must be created to execute a JOG operation. Consider the
"required control data setting", "start conditions" and "start time chart" when creating
the program.
The following shows an example when a JOG operation is started for axis 1.
("
Cd.17
JOG speed" is set to "100.00mm/min" in the example shown.)
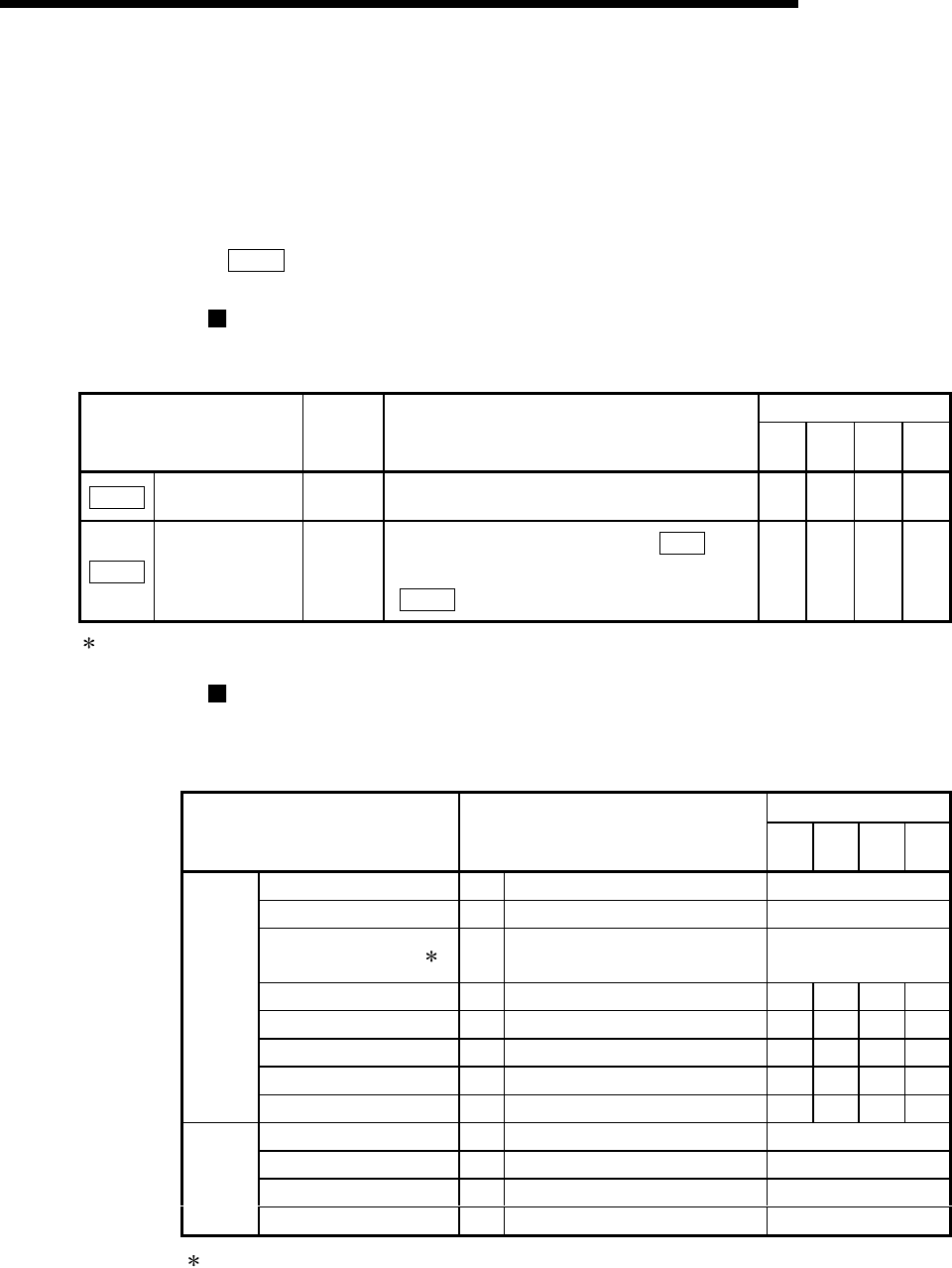
Required control data setting
The control data shown below must be set to execute a JOG operation. The
setting is carried out with the sequence program.
Buffer memory address
Setting item
Setting
value
Setting details
Axis
1
Axis
2
Axis
3
Axis
4
Cd.16
Inching movement
amount
0 Set “0”. 1517 1617 1717 1817
Cd.17
JOG speed 10000
Set a value equal to or above the "
Pr.7
Bias
speed at start" and equal to or below the
"
Pr.31
JOG speed limit value".
1518
1519
1618
1619
1718
1719
1818
1819
Refer to Section 5.7 "List of control data" for details on the setting details.
Start conditions
The following conditions must be fulfilled when starting. The required conditions
must also be assembled in the sequence program, and the sequence program
must be configured so the operation will not start if the conditions are not fulfilled.
Device
Signal name Signal state
Axis
1
Axis
2
Axis
3
Axis
4
PLC READY signal ON PLC CPU preparation completed Y0
QD75 READY signal ON QD75 preparation completed X0
Synchronization flag ON
QD75 buffer memory
The access is possible.
X1
Axis stop signal OFF Axis stop signal is OFF Y4 Y5 Y6 Y7
Start complete signal OFF Start complete signal is OFF X10 X11 X12 X13
BUSY signal OFF QD75 is not operating XC XD XE XF
Error detection signal OFF There is no error X8 X9 XA XB
Interface
signal
M code ON signal OFF M code ON signal is OFF X4 X5 X6 X7
Drive unit READY signal ON Drive unit preparation completed –
Stop signal OFF Stop signal is OFF –
Upper limit (FLS) ON Within limit range –
External
signal
Lower limit (RLS) ON Within limit range –
If the PLC CPU is set to the asynchronous mode in the synchronization setting, this must be
inserted in the program for interlocking. If it is set to the synchronous mode, it must not be
inserted in the program for interlocking because it is turned ON when the PLC CPU executes
calculation.