

















5 - 55
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
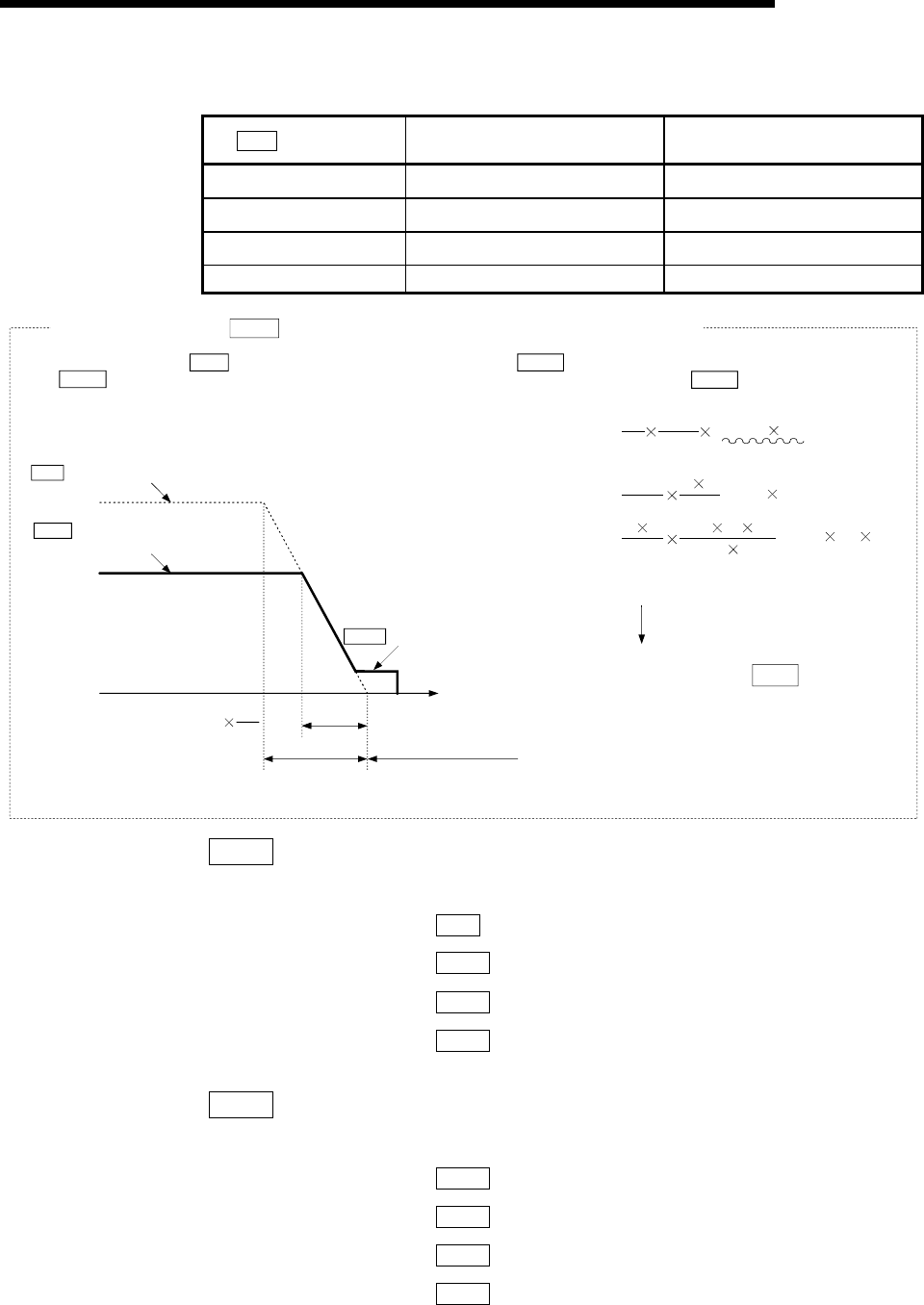
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
0 to 214748364.7 (
µ
m)
0 to 2147483647 (
×
10
-1
µ
m)
1 : inch 0 to 21474.83647 (inch)
0 to 2147483647 (
×
10
-5
inch)
2 : degree 0 to 21474.83647 (degree)
0 to 2147483647 (
×
10
-5
degree)
3 : pulse 0 to 2147483647 (pulse) 0 to 2147483647 (pulse)
Deceleration time: Tb=300ms
Creep speed: Vc=1kpulse/s
Actual deceleration time:t = Tb
t
Vz
Vp
Pr.47
Speed limit value: Vp=200kpulse/s
Pr.8
OPR speed:
Vz=10kpulse/s
Pr.46
[Machine OPR operation]
Example of setting for " Pr. 50 Setting for the movement amount after near-point dog ON"
Assuming that the " Pr. 8 Speed limit value" is set to 200 kpulse/s, " Pr. 46 OPR speed" to 10 kpulse/s,
" Pr. 47 Creep speed" to 1 kpulse/s, and deceleration time to 300 ms, the minimum value of " Pr. 50 Setting for the
movement amount after near-point dog ON" is calculated as follows:
[Deceleration distance] =
1
2
Vz
1000
t + 0.01 Vz
Movement amount for
10ms at OPR speed
=
Tb Vz
Vp
+ 0.01 Vz
Vz
2000
=
300 10 10
200 10
10 10
2000
3 3
3
+ 0.01 10 10
3
= 75 + 100
= 175
Setting for the movement amount after
near-point dog ON ( Pr. 50 ) should be
equal to or larger than 175.
Pr.51
OPR acceleration time selection
Set which of "acceleration time 0 to 3" to use for the acceleration time during OPR.
0 : Use the value set in "
Pr.9
Acceleration time 0".
1 : Use the value set in "
Pr.25
Acceleration time 1".
2 : Use the value set in "
Pr.26
Acceleration time 2".
3 : Use the value set in "
Pr.27
Acceleration time 3".
Pr.52
OPR deceleration time selection
Set which of "deceleration time 0 to 3" to use for the deceleration time during OPR.
0 : Use the value set in "
Pr.10
Deceleration time 0".
1 : Use the value set in "
Pr.28
Deceleration time 1".
2 : Use the value set in "
Pr.29
Deceleration time 2".
3 : Use the value set in "
Pr.30
Deceleration time 3".