















Appendix - 68
MELSEC-Q
APPENDICES
Appendix 10 MELSEC Explanation of positioning terms
1-2 PHASE EXCITATION SYSTEM
This is one system for exciting each stepping
motor coil in a determined order. In this
system, one phase and two phases are
alternately excited.
Pulse input
A phase
A phase
B phase
B phase
2-PHASE EXCITATION SYSTEM
This is one system for exciting each stepping
motor coil in a determined order. In this
system, a current constantly flows to 2 phases
to carry out step feed.
Pulse input
B phase
A phase
A phase
B phase
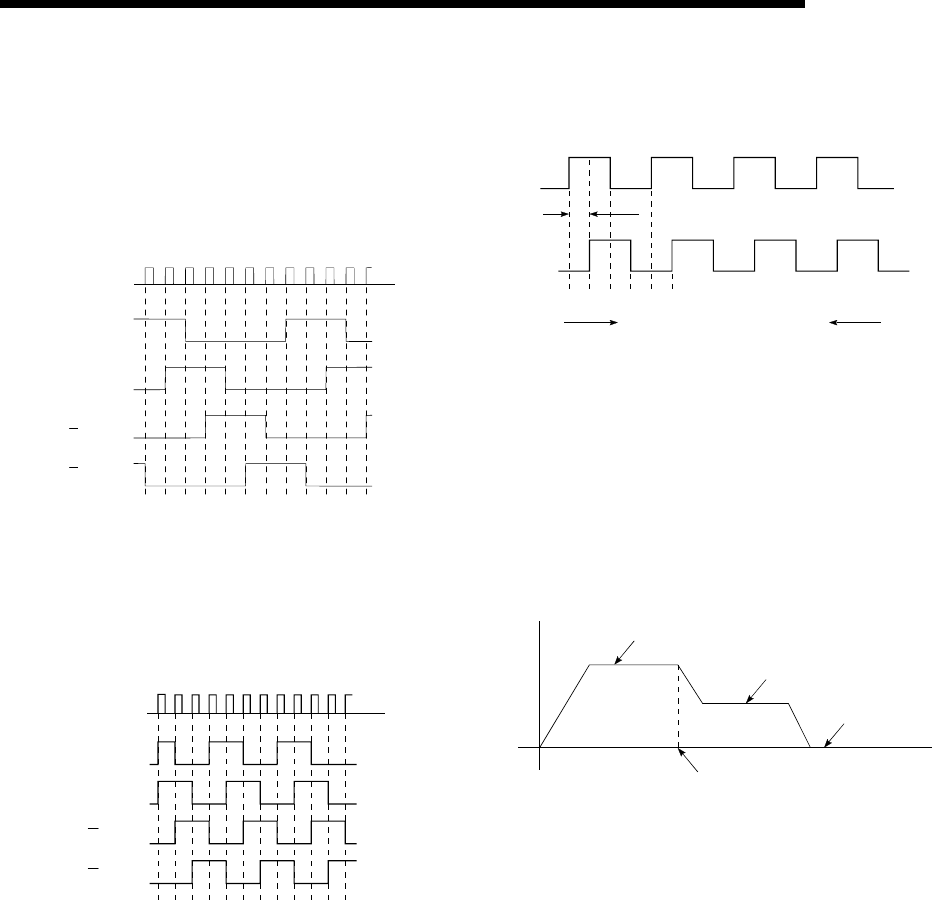
2-PHASE PULSE
An A phase and B phase double pulse. There
is a phase difference between the two phases,
so that difference can be automatically added
and subtracted in the pulse count. The
standard phase difference is a 90ø electrical
angle.
If the B phase were to lag behind the A phase
in a forward run (B phase turns ON after the A
phase), the A phase would lag behind the B
phase in a reverse run (A phase turns ON after
the B phase). In this way the forward and
reverse run (addition and subtraction) can be
automatically carried out.
12345678910111213141516
90°
A phase
B phase
Pulse countForward run
(addition)
Reverse run
(subtraction)
2-SPEED TRAPEZOIDAL CONTROL
In this positioning control method, the
positioning pattern, positioning addresses (P1,
P2), and positioning speeds (V1, V2) are set in
the sequence program. Positioning is carried
out to positioning address P1 by issuing the 1st
positioning start command. When P1 is
reached, the positioning then automatically
changes to positioning at the V2 speed.
Speed
Positioning speed V1
Positioning speed V2
Time
Positioning address P2
Positioning address P1