


















5 - 27
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
[Table 1]
Pr.1
setting value
Value set with peripheral device (unit) Value set with sequence program (unit)
0 : mm 0 to 20000000.00 (mm/min)
0 to 2000000000 (×10
-2
mm/min)
1 : inch 0 to 2000000.000 (inch/min)
0 to 2000000000 (×10
-3
inch/min)
2 : degree 0 to 2000000.000 (degree/min)
0 to 2000000000 (×10
-3
degree/min)
3 : pulse 0 to 1000000 (pulse/s) 0 to 1000000 (pulse/s)
[Table 2]
Pr.1
setting value
Value set with peripheral device (unit) Value set with sequence program (unit)
0 : mm 0.01 to 20000000.00 (mm/min)
1 to 2000000000 (×10
-2
mm/min)
1 : inch 0.001 to 2000000.000 (inch/min)
1 to 2000000000 (×10
-3
inch/min)
2 : degree 0.001 to 2000000.000 (degree/min)
1 to 2000000000 (×10
-3
degree/min)
3 : pulse
[Select type
1 is QD75P]
1 to 200000 (pulse/s)
[Select type
1 is QD75D]
1 to 1000000 (pulse/s)
1 to 1000000 (pulse/s)
2
1: For Select type, refer to GX Configurator-QP Operating Manual.
2: When using the QD75P (open collector output type), set the value to within "1 to 200000 (pulse/s)".
Pr.8
Speed limit value
Set the maximum speed during positioning and OPR operations.
The maximum speed during positioning control has to be limited in consideration
of the drive unit and control target specifications.
Take account of the following when determining the speed limit value:
1) Motor speed
2) Workpiece movement speed
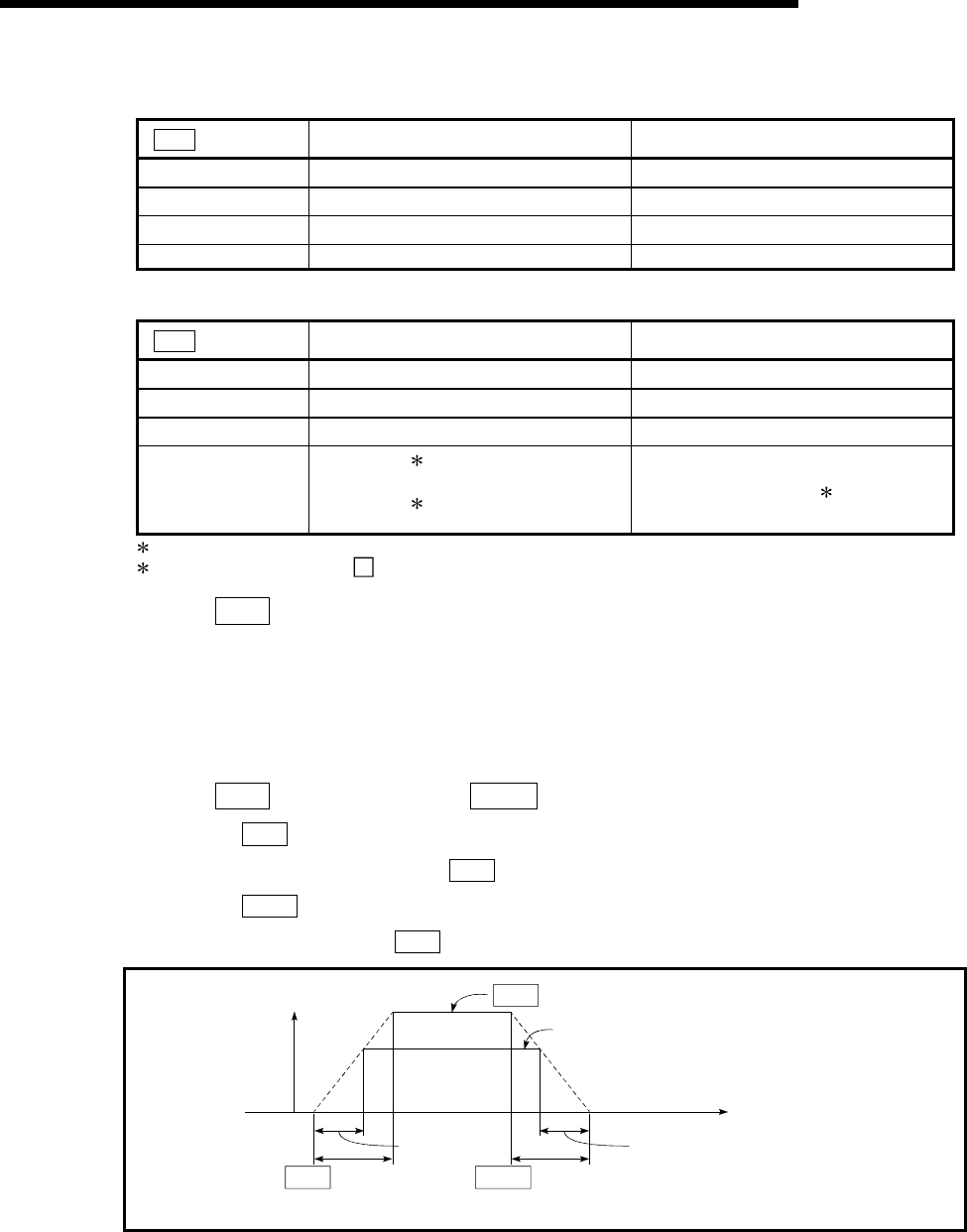
Pr.9
Acceleration time 0,
Pr.10
Deceleration time 0
"
Pr.9
Acceleration time 0" specifies the time for the speed to increase from zero
to the speed limit value (
Pr.8
).
"
Pr.10
Deceleration time 0" specifies the time for the speed to decrease from the
speed limit value (
Pr.8
) to zero.
Actual
acceleration
time
Actual deceleration time
Time
Speed
Speed limit value
Positioning speed
Acceleration time 0
Pr.9
Pr.10
Pr.8
Deceleration time 0
1) If the positioning speed is set lower than the parameter-defined speed limit
value, the actual acceleration/deceleration time will be relatively short. Thus,
set the maximum positioning speed equal to or only a little lower than the
parameter-defined speed limit value.
2) These settings are valid for OPR, positioning and JOG operations.
3) When the positioning involves interpolation, the acceleration/deceleration time
defined for the reference axis is valid.