


















5 - 28
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
5.2.3 Detailed parameters 1
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with
sequence program
Default value
Axis 1 Axis 2 Axis 3 Axis 4
Pr.11
Backlash compensation
amount
The setting value range differs according to the "
Pr.1
Unit
setting".
Here, the value within the [Table 1] range is set.
[Table 1] on right page
0 17 167 317 467
Pr.12
Software stroke limit upper
limit value
2147483647
18
19
168
169
318
319
468
469
Pr.13
Software stroke limit lower
limit value
The setting value range differs according to the "
Pr.1
Unit
setting".
Here, the value within the [Table 2] range is set.
[Table 2] on right page
–2147483648
20
21
170
171
320
321
470
471
0 : Apply software stroke limit on current
feed value
0
Pr.14
Software stroke limit
selection
1 : Apply software stroke limit on
machine feed value
1
0 22 172 322 472
0 : Software stroke limit valid during JOG
operation,inching operation and
manual pulse generator operation
0
Pr.15
Software stroke limit
valid/invalid setting
1 : Software stroke limit invalid during
JOG operation ,inching operation and
manual pulse generator operation
1
0 23 173 323 473
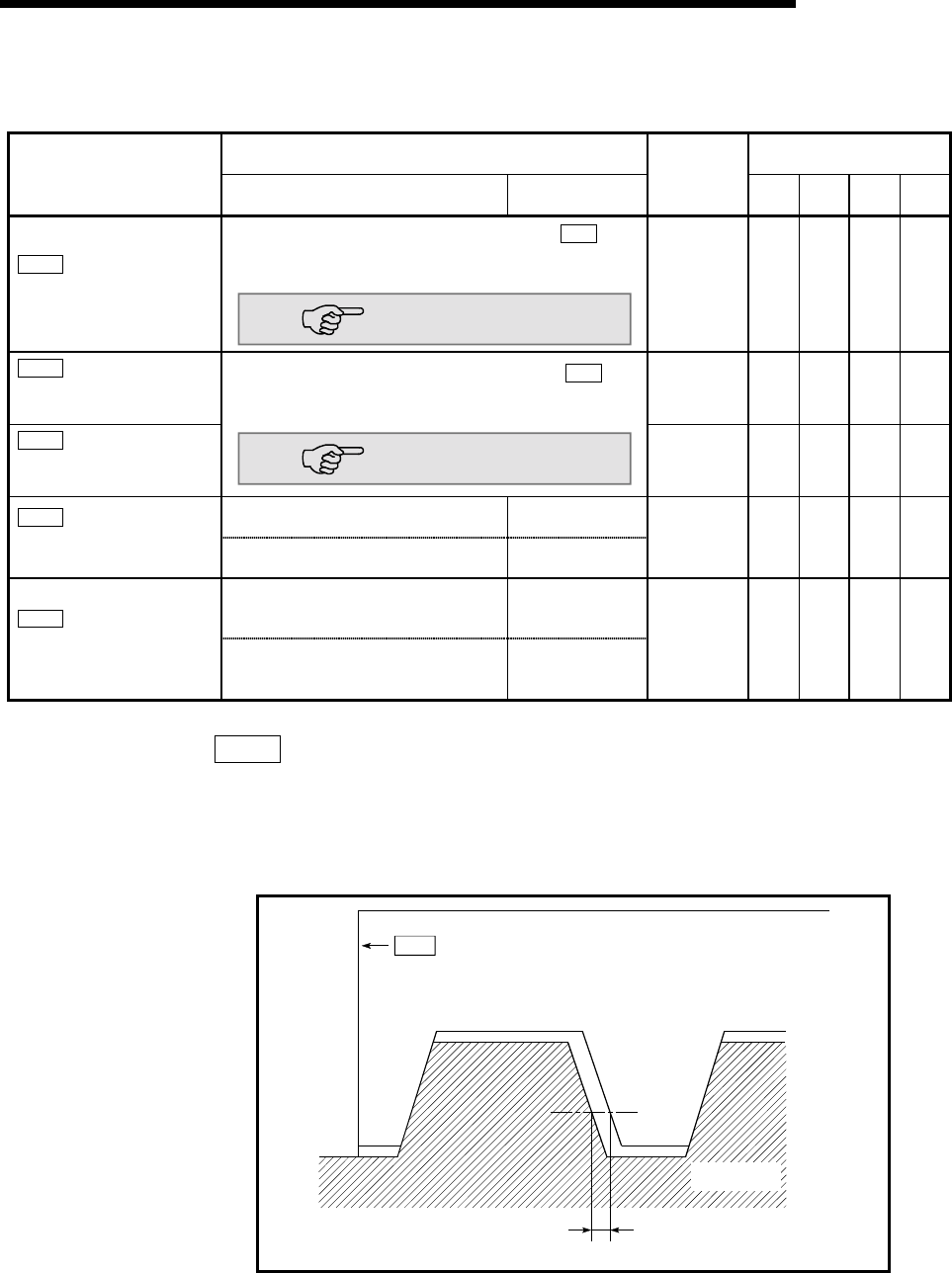
Pr.11
Backlash compensation amount
The error that occurs due to backlash when moving the machine via gears can be
compensated.
When the backlash compensation amount is set, pulses equivalent to the
compensation amount will be output each time the direction changes during
positioning.
Workpiece
(moving body)
Worm gear
Backlash
(compensation amount)
Pr.44
OPR direction