


















5 - 24
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
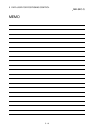
(3) A phase/B phase mode
Forward run and reverse run are controlled with the phase difference of the A
phase (A
) and B phase (B ).
•
When the B phase is 90
°
behind the A phase, the motor will forward run.
•
When the B phase is 90
°
ahead of the A phase, the motor will reverse run.
Positive logic Negative logic
1) For multiple of 1 setting
Forward run Reverse run
A phase
(A )
B phase
(B )
When B phase is
90° behind A phase
When B phase is
90° ahead of A phase
Command pulse output Command pulse output
1) For multiple of 1 setting
Forward run Reverse run
When B phase is
90° behind A phase
When B phase is
90° ahead of A phase
Command pulse output Command pulse output
2) For multiple of 4 setting
A phase
(A )
B phase
(B )
Forward run Reverse run
When B phase is
90° behind A phase
When B phase is
90° ahead of A phase
Command pulse output Command pulse output
2) For multiple of 4 setting
Forward run Reverse run
When B phase is
90° behind A phase
When B phase is
90° ahead of A phase
Command pulse output Command pulse output
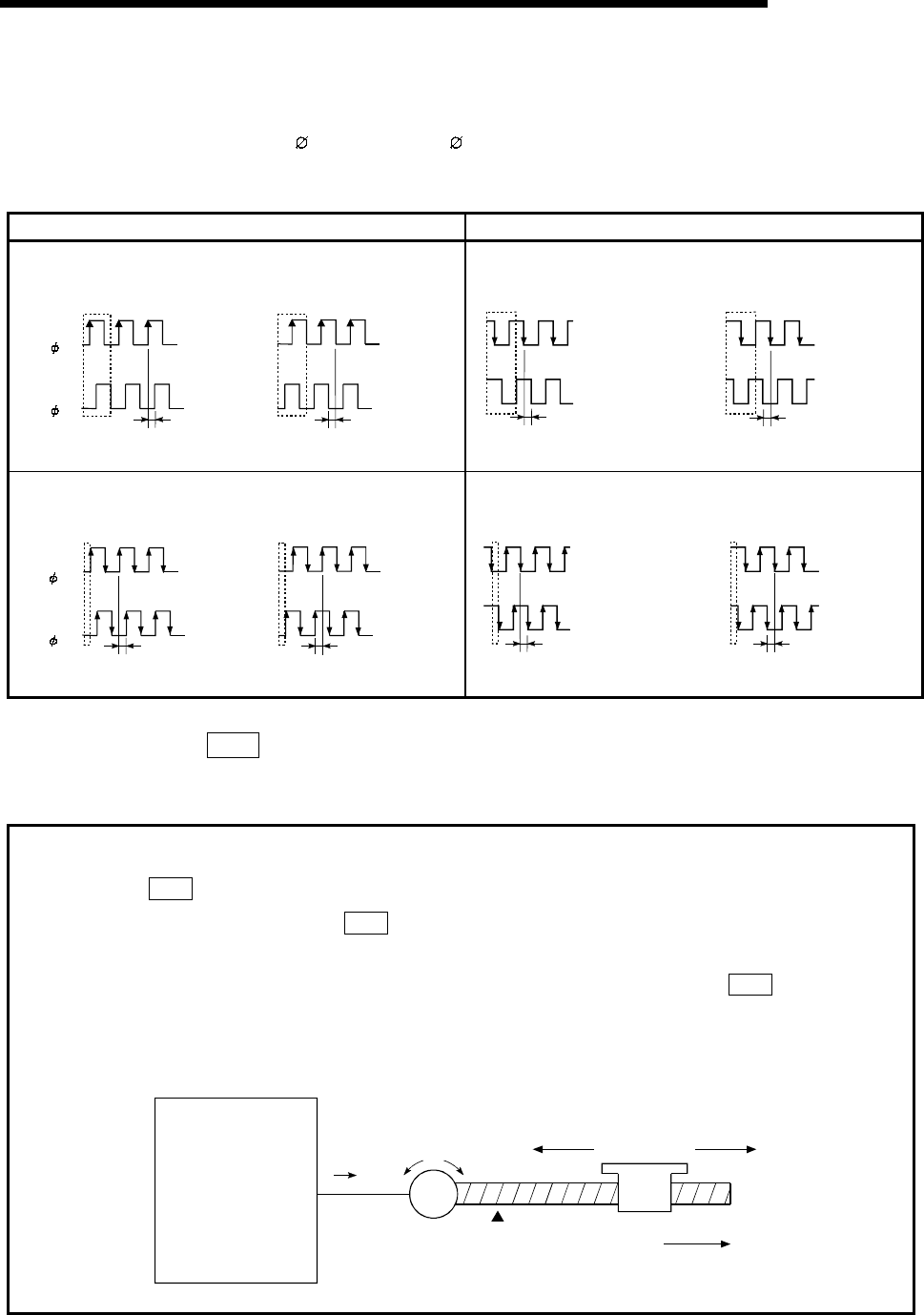
Pr.6
Rotation direction setting
Set the relation of the motor rotation direction and current value address
increment/decrement.
[Setting procedure]
1) Set "0" in
Pr.6
, and carry out forward run JOG operation.
("0" is set as the default value for
Pr.6
.)
2) When workpiece "W" moves toward the address increment direction, keep the current setting.
When workpiece "W" moves toward the address decrement direction, set "1" in
Pr.6
to change the
rotation direction.
3) Carry out forward run JOG operation again, and if "W" moves toward the increment direction, the
setting is complete.
M
W
QD75
1) Forward run pulse
Motor
Address decre-
ment direction
Address incre-
ment direction
2) Workpiece
OP
3)