



















Appendix - 76
MELSEC-Q
APPENDICES
ERROR CORRECTION
If a dimension error occurs in the machine,
and that error is actually smaller or larger than
1m (3.28feet) in spite of a 1m (3.28feet)
command being issued from the QD75, that
error amount will be compensated. For
example, when the error is actually smaller
than 1m (3.28feet), the remaining distance to
1m (3.28feet) is fed, and the correct 1m
(3.28feet) of positioning is carried out.
ERROR RESET
This resets error of axis. Note that if the cause
of the error is not eliminated at that time, the
error will occur again.
EXTERNAL REGENERATIVE BRAKE
RESISTOR
This is also called the regenerative brake.
When a machine is moved with a motor, power
is normally supplied to the motor from an
amplifier. However, the rotation energy in the
motor and machine counterflows (regenerates)
to the amplifier when the motor is decelerating
or when driving a descending load.
The external regenerative resistor consumes
this regeneration energy with resistance,
obtains the regenerative brake torque, and
enables the full capacity of the regeneration
system during stopping.
It is used when carrying out highly repetitive
acceleration/deceleration.
F
In the QD75, F is a status where the module
itself has a fault.
[HOLD]
FAST OPR
The axis returns to the machine OP at the
OPR speed without detecting the near-point
dog.
(This is not validated unless a machine OPR
has been carried out first.)
OP
Dog switch
OPR speed
FEED PULSE
This is a pulse issued from the positioning
module to a servomotor or stepping motor.
Also called a command pulse.
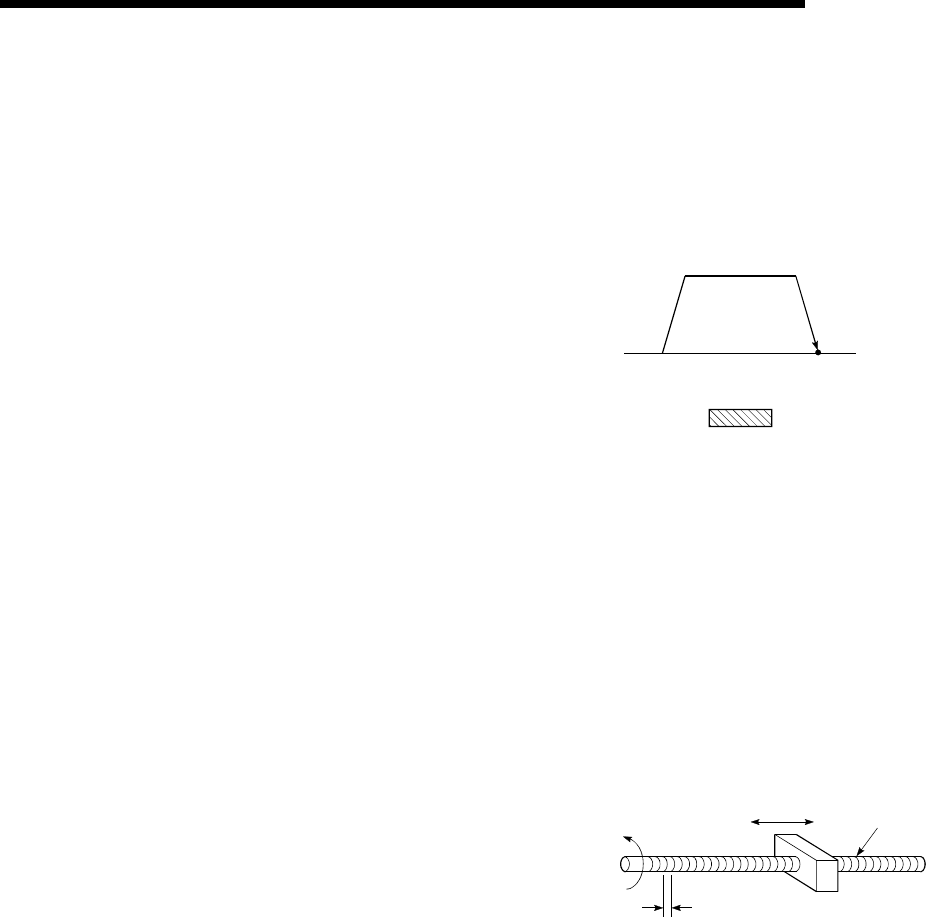
FEED SCREW
This is the basic screw in mechanisms that
position using screw rotation. Ball screws are
often used to reduce backlash and dimension
error.
1 rotation
by the motor
Positioning
feed screw
Lead (feedrate per screw rotation)
FEEDBACK PULSE
This is a method of using a returning pulse
train to confirm whether the machine faithfully
operated according to the commands issued in
automatic control. If the machine did not
faithfully operate according to the commands,
a correction command is issued. For example,
if a command is issued for 10,000 pulses, and
a feedback pulse of 10,000 pulses is returned,
then the balance becomes 0 and it can be
judged that the command was faithfully
followed.
Refer to the term "DEVIATION COUNTER".