
















5 - 22
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
However, the maximum value that can be set for this "movement amount per
rotation (Al)" parameter is 6553.5
µ
m (approx. 6.5mm). Set the "movement amount
per rotation (Al)" as shown below so that the "movement amount per rotation (AL)"
does not exceed this maximum value.
Movement amount per rotation (AL)
= PB
×
1/n
= Movement amount per rotation (Al)
×
Unit magnification (Am)
Note) The unit magnification (Am) is a value of 1, 10, 100 or 1000. If the "PB
×
1/n" value exceeds 6553.5
µ
m, adjust with the unit magnification so that the
"movement amount per rotation (Al) " does not exceed 6553.5
µ
m.
Example 1)
When movement amount per rotation (AL) = PB
×
1/n = 6000.0
µ
m (= 6mm)
Movement amount per rotation (AL)
= Movement amount per rotation (Al)
×
Unit magnification (Am)
= 6000
×
1
Example 2)
When movement amount per rotation (AL) = PB
×
1/n = 60000.0
µ
m (= 60mm)
Movement amount per rotation (AL)
= Movement amount per rotation (Al)
×
Unit magnification (Am)
= 6000
×
10
= 600
×
100
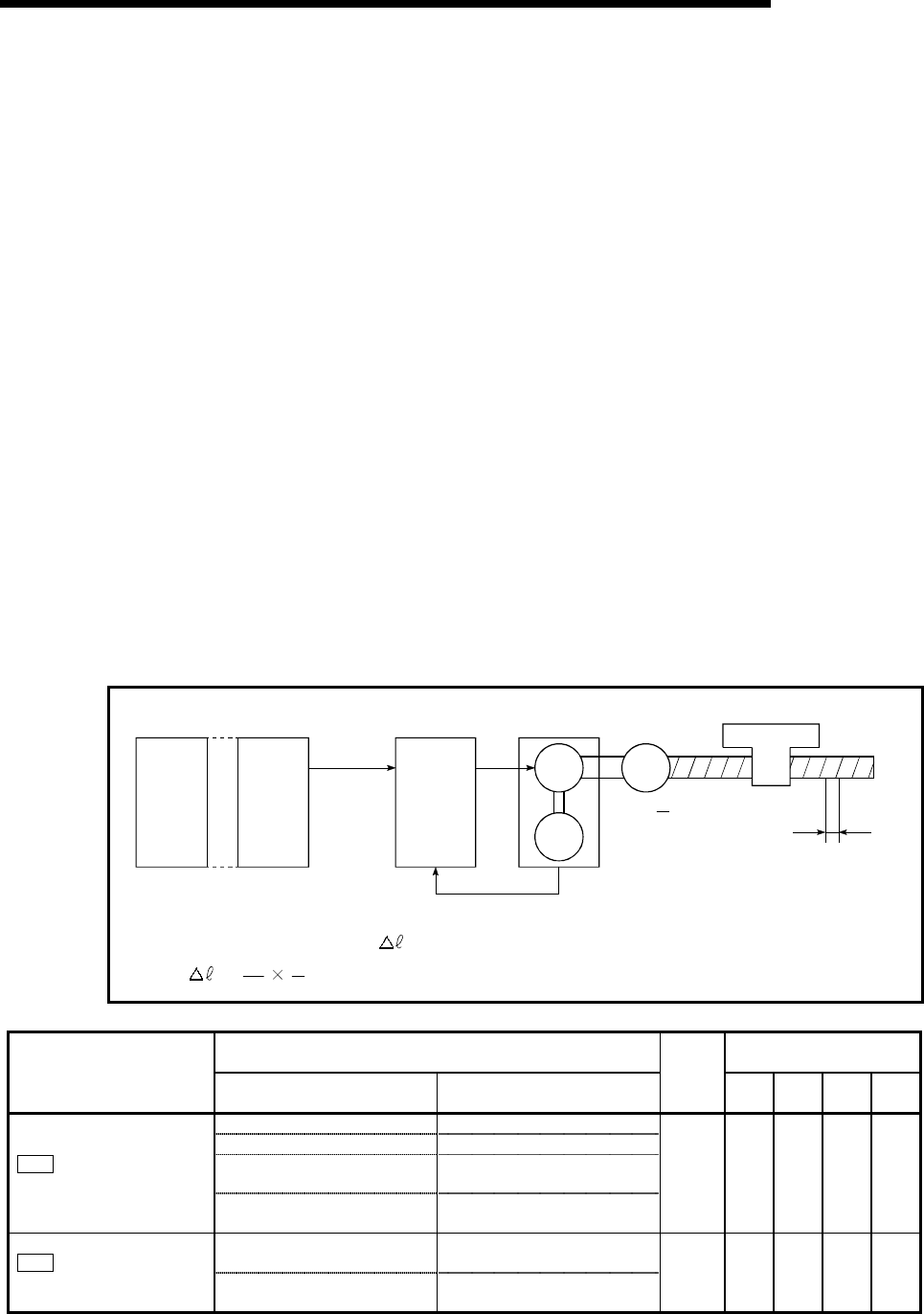
M G
1
n
P
f
P
B
PLC
PLC CPU QD75
Servo amplifier Servomotor
Workpiece
Encoder
Reduction gears
: Worm gear lead (mm/rev)
: Deceleration rate
: No. of encoder pulses (pulse/rev)
P
B
1/n
P
f
Movement amount per pulse
1
n
P
B
P
f
=
[mm/pulse]
Setting value, setting range
Setting value buffer memory
address
Item
Value set with peripheral device
Value set with sequence
program
Default
value
Axis 1 Axis 2 Axis 3 Axis 4
0 : PULSE/SIGN mode 0
1 : CW/CCW mode 1
2 : A phase/B phase
(multiple of 4)
2
Pr.5
Pulse output mode
3 : A phase/B phase
(multiple of 1)
3
1 4 154 304 454
0 : Current value increment with
forward run pulse output
0
Pr.6
Rotation direction setting
1 : Current value increment with
reverse run pulse output
1
0 5 155 305 455