

















3 - 7
MELSEC-Q
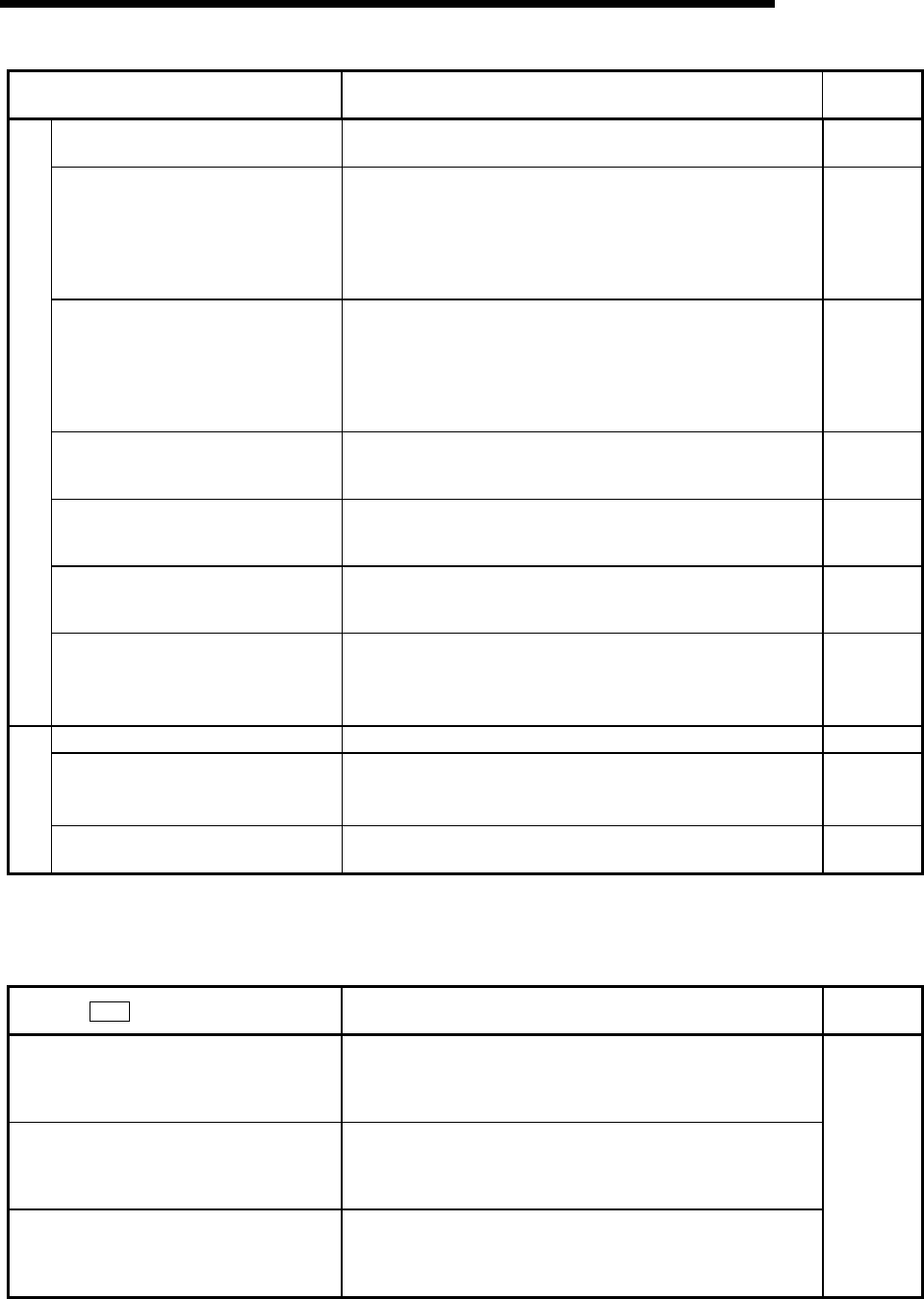
3 SPECIFICATIONS AND FUNCTIONS
Main functions Details
Reference
section
Block start (Normal start)
With one start, executes the positioning data in a random block
with the set order.
10.3.2
Condition start
Carries out condition judgment set in the "condition data" for
the designated positioning data, and then executes the "block
start data".
When the condition is established, the "block start data" is
executed. When not established, that "block start data" is
ignored, and the next point's "block start data" is executed.
10.3.3
Wait start
Carries out condition judgment set in the "condition data" for
the designated positioning data, and then executes the "block
start data".
When the condition is established, the "block start data" is
executed. When not established, stops the control until the
condition is established. (Waits.)
10.3.4
Simultaneous start
Simultaneously executes the positioning data having the No.
for the axis designated with the "condition data". (Outputs
pulses at the same timing.)
10.3.5
Repeated start (FOR loop)
Repeats the program from the block start data set with the
"FOR loop" to the block start data set in "NEXT" for the
designated No. of times.
10.3.6
Repeated start (FOR condition)
Repeats the program from the block start data set with the
"FOR condition" to the block start data set in "NEXT" until the
conditions set in the "condition data" are established.
10.3.7
High-level positioning control
Multiple axes simultaneous start
control
Starts the operation of multiple axes simultaneously according
to the pulse output level.
(Positioning start No. 9004, same as the "simultaneous start"
above)
10.5
JOG operation Outputs a pulse to drive unit while the JOG start signal is ON. 11.2
Inching operation
Outputs pulses corresponding to minute movement amount by
manual operation to drive unit.
(Performs fine adjustment with the JOG start signal.)
11.3
Manual control
Manual pulse generator operation
Outputs pulses commanded with the manual pulse generator to
drive unit. (Carry out fine adjustment, etc., at the pulse level.)
11.4
With the "major positioning control" ("high-level positioning control"), whether or not to
continuously execute the positioning data can be set with the "operation pattern".
Outlines of the "operation patterns" are given below.
Da.1
Operation pattern
Details
Reference
section
Independent positioning control
(Positioning complete)
When "independent positioning control" is set for the operation
pattern of the started positioning data, only the designated
positioning data will be executed, and then the positioning will
end.
Continuous positioning control
When "continuous positioning control" is set for the operation
pattern of the started positioning data, after the designated
positioning data is executed, the program will stop once, and
then the next following positioning data will be executed.
Continuous path control
When "continuous path control" is set for the operation pattern
of the started positioning data, the designated positioning data
will be executed, and then without decelerating, the next
following positioning data will be executed.
9.1.2