



















6 - 44
MELSEC-Q
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
[3] Order of priority for stop process
The order of priority for the QD75 stop process is as follows.
Deceleration stop < Sudden stop < Immediate stop
(1) If the deceleration stop command ON (stop signal ON) or deceleration stop
cause occurs during deceleration to speed 0 (including automatic
deceleration), operation changes depending on the setting of "
Cd.42
Stop
command processing for deceleration stop selection".
(a) Manual control
Independently of the
Cd.42
setting, a deceleration curve is re-processed
from the speed at stop cause occurrence.
(b) OPR control, positioning control
•
When
Cd.42
= 0 (deceleration curve re-processing):
A deceleration curve is re-processed from the speed at stop cause
occurrence.
•
When
Cd.42
= 1 (deceleration curve continuation):
The current deceleration curve is continued after stop cause occurrence.
(For details, refer to "Section 12.7.10 Stop command processing for
deceleration stop function".)
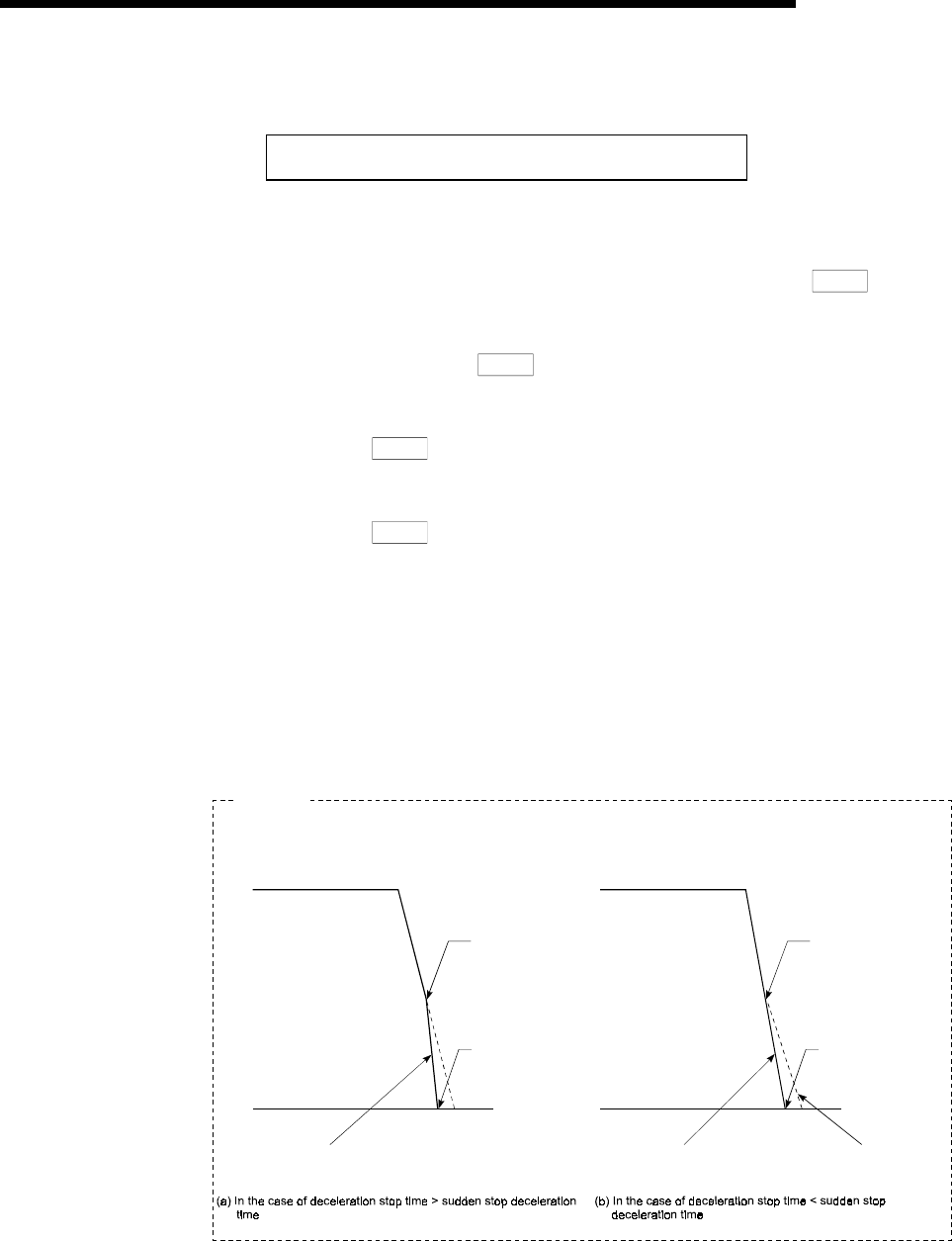
(2) If the stop signal ON or stop cause specified for a sudden stop occurs during
deceleration, sudden stop process will start at that point.
However, if the sudden stop deceleration time is longer than the deceleration
time, the deceleration stop process will be continued even if a sudden stop
cause occurs during the deceleration stop process.
Positioning speed
Deceleration
stop process
Stop
Sudden
stop cause
Sudden stop deceleration process
Deceleration stop process continues Process for sudden stop
Positioning speed
Deceleration
stop process
Stop
Sudden
stop cause
Example
The process when a sudden stop cause occurs during deceleration stop is shown below.
(3) Operation will stop immediately if the target reaches the positioning address
specified in the currently executed positioning data during deceleration of
position control.