



















9 - 96
MELSEC-Q
9 MAJOR POSITIONING CONTROL
Restrictions
(1) An axis error (error code: 516) will occur and the operation cannot start if
"continuous positioning control" or "continuous path control" is set in "
Da.1
Operation pattern".
(2) "Speed-position switching control" cannot be set in "
Da.2
Control system" of
the positioning data when "continuous path control" has been set in "
Da.1
Operation pattern" of the immediately prior positioning data. (For example, if
the operation pattern of positioning data No. 1 is "continuous path control",
"speed-position switching control" cannot be set in positioning data No. 2.) An
axis error (error code: 516) will occur and the machine will carry out a
deceleration stop if this type of setting is carried out.
(3) An error (error code: 503) will occur if "current speed (-1)" is set in "
Da.8
command speed".
(4) If the value set in "
Da.6
Positioning address/movement amount" is negative,
an error (error code: 530) will occur.
(5) Even though the axis control data "
Cd.23
Speed-position switching control
movement amount change register" was set in speed-position switching
control (ABS mode), it would not function. The set value is ignored.
(6) To exercise speed-position switching control (ABS mode), the following
conditions must be satisfied:
(a) "
Pr.1
Unit setting" is "2: degree"
(b) The software stroke limit function is invalid (upper limit value = lower limit
value)
(c) "
Pr.21
Current feed value during speed control" is "1: Update current
feed value"
(d) The "
Da.6
Positioning address/movement amount" setting range is 0 to
359.99999 (degree)
If the value is outside of the range 0 to 359.99999 (degree), an error (error
code: 530) will occur at a start.
(e) The "
Pr.150
Speed-position function selection" setting is "2: Speed-
position switching control (ABS mode)".
(7) If any of the conditions in (6)(a) to (6)(c) is not satisfied in the case of (6)(e), an
error (error code: 935) will occur when the PLC READY signal [Y0] turns from
OFF to ON.
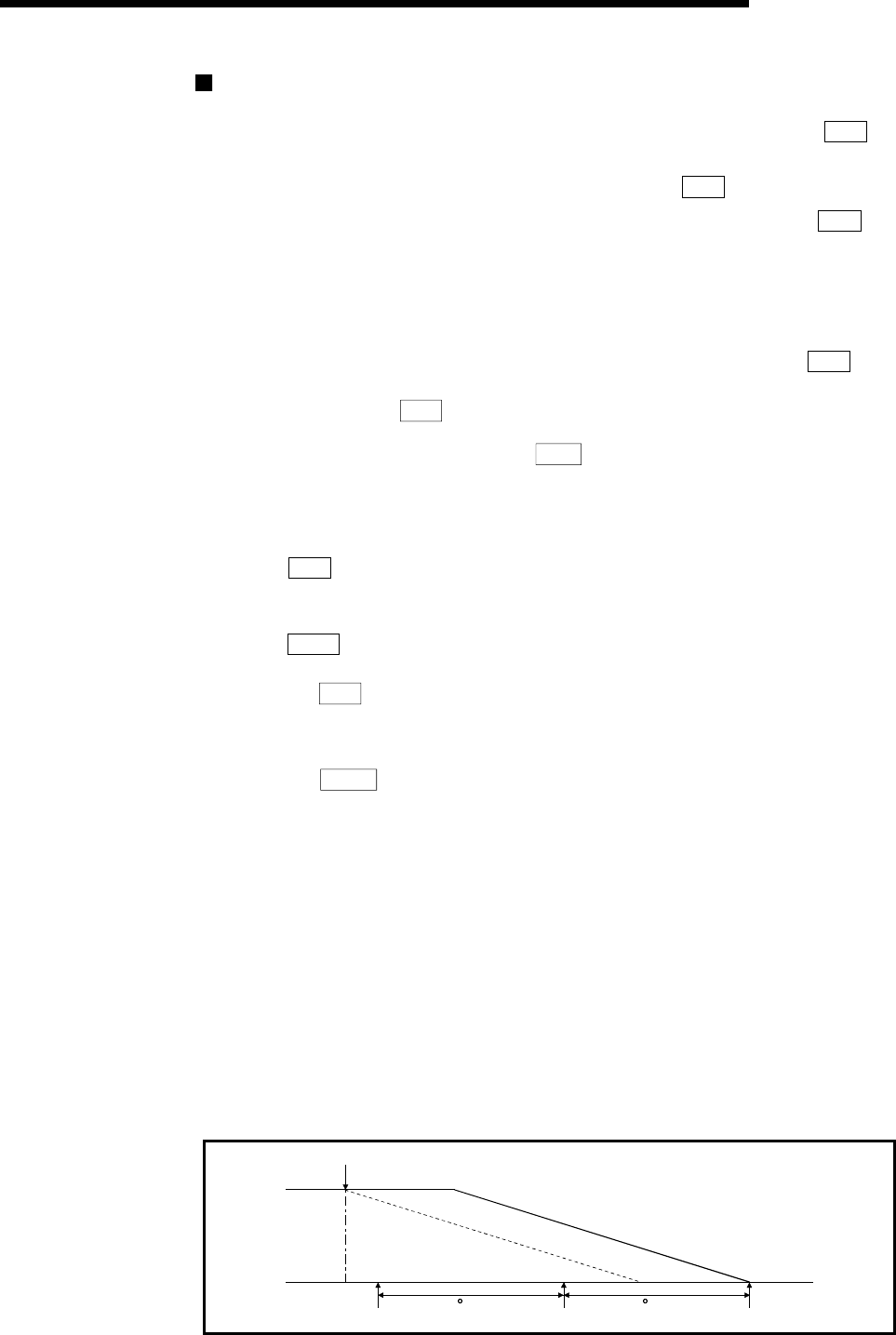
(8) If the axis reaches the positioning address midway through deceleration after
automatic deceleration started at the input of the speed-position switching
signal, the axis will not stop immediately at the positioning address. The axis
will stop at the positioning address after N revolutions so that automatic
deceleration can always be made. (N: Natural number)
In this case, make the movement amount after speed-position switching signal
input within 21474.83647 (degree). If the movement amount exceeds
21474.83647 (degree), make the movement amount smaller by reducing the
command speed or shortening the deceleration time, for example.
In the following example, since making deceleration in the path of dotted line
will cause the axis to exceed the positioning addresses twice, the axis will
decelerate to a stop at the third positioning address.
Speed-position switching signal
positioning address
360 added 360 added
positioning address positioning address