



















12 - 9
MELSEC-Q
12 CONTROL SUB FUNCTIONS
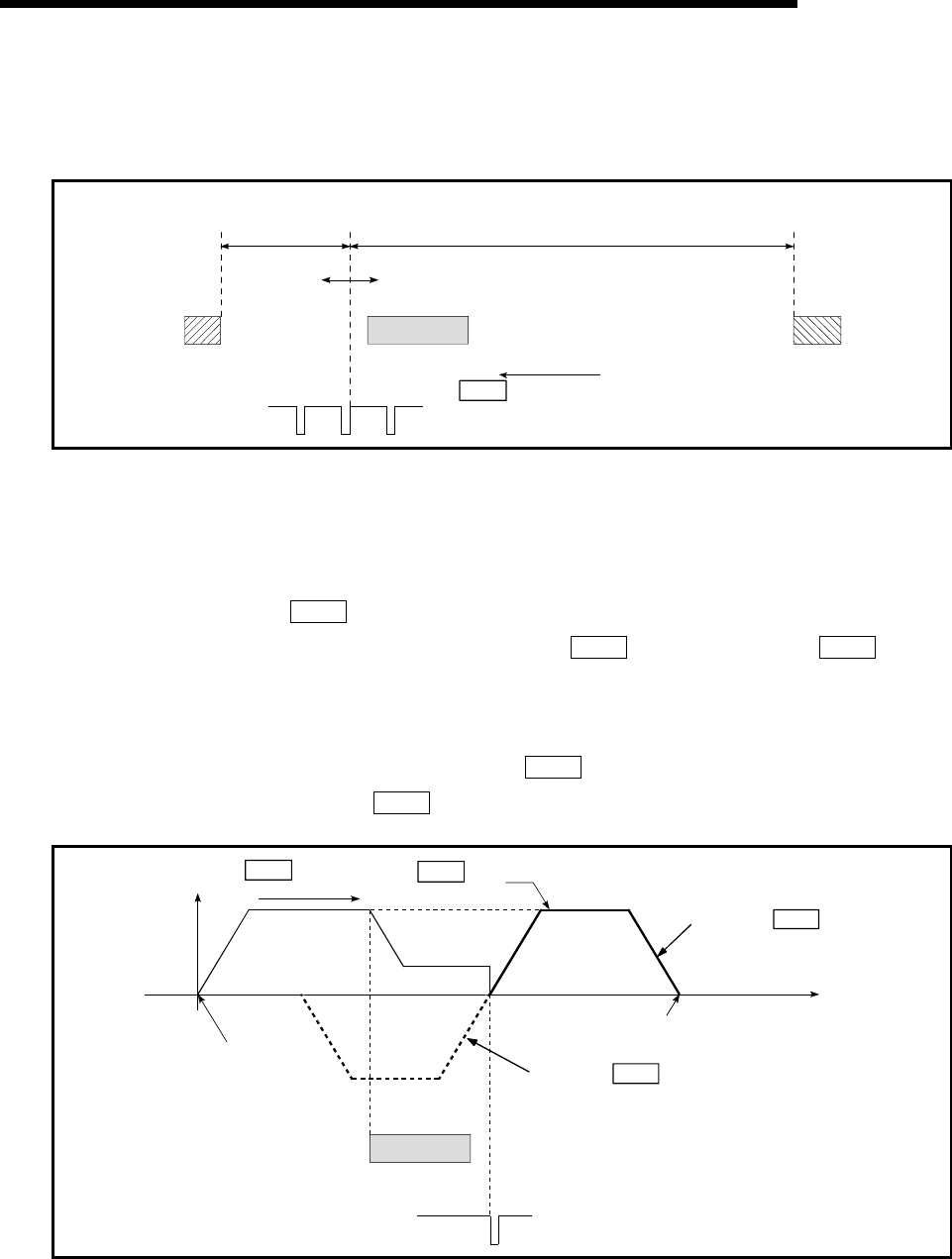
[2] Setting range for the OP shift amount
Set the OP shift amount within the range from the detected zero signal to the
upper/lower limit switches.
Setting range of the
negative OP
shift amount
Setting range of the positive OP shift amount
Address decrease
direction
Upper limit
Lower limit
Near-point dog
Pr. 44 OPR direction
Zero signal
Address increase
direction
Fig. 12.5 Setting range for the OP shift amount
[3] Movement speed during OP shift
When using the OP shift function, the movement speed during the OP shift is set
in "
Pr.56
Speed designation during OP shift". The movement speed during the
OP shift is selected from either the "
Pr.46
OPR speed" or the "
Pr.47
Creep
speed".
The following drawings show the movement speed during the OP shift when a
mechanical OPR is carried out by the near-point dog method.
(1) OP shift operation at the "
Pr.46
OPR speed"
(When "
Pr.56
speed designation during OP shift" is 0)
OP
When the " Pr. 53 OP
shift amount" is positive
When the " Pr. 53 OP
shift amount" is negative
Pr. 44 OPR
direction
Machine OPR start
Pr. 46 OPR
speed
Near-point dog
Zero signal
Fig. 12.6 OP shift operation at the OPR speed