
















5 - 21
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
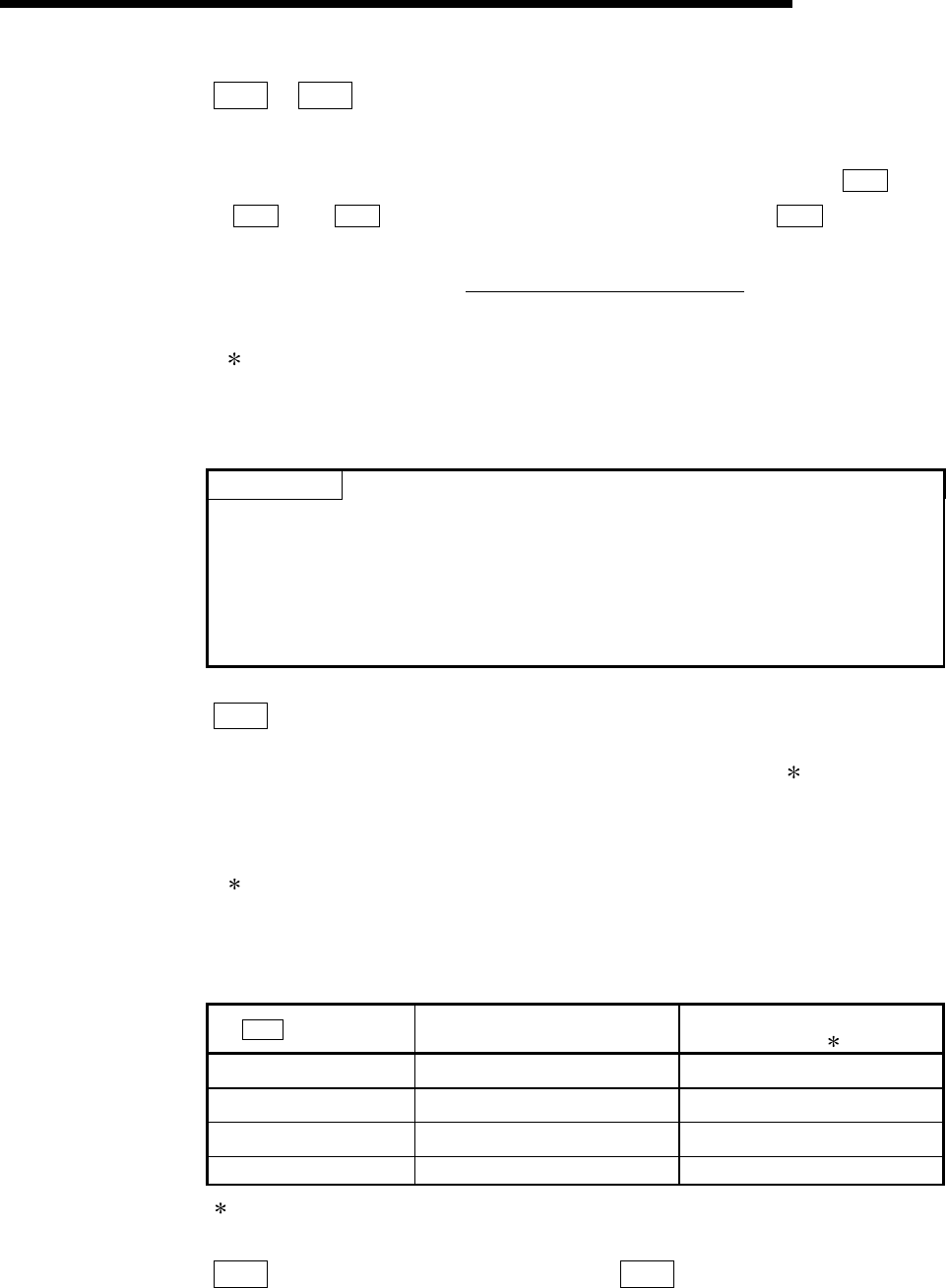
Pr.2
to
Pr.4
Movement amount per pulse
These parameters define the amount of movement achieved by each single pulse
within a pulse train output by the QD75.
The following paragraphs explain how to set the individual parameters
Pr.2
,
Pr.3
, and
Pr.4
assuming that the unit "mm" is selected with
Pr.1
.
The movement amount per pulse is given by the following expression:
Movement amount per rotation (Al)
Movement amount per pulse =
No. of pulses per rotation (Ap)
Due to the mechanical tolerance, the actual movement amount may differ
slightly from the instructed movement amount. The error can be compensated
by adjusting the movement amount per pulse defined here.
(Refer to Section 12.3.2 "Electronic gear function".)
POINT
If the movement amount per pulse is less than 1, command frequency variations
will occur.
Smaller setting will increase variations and may cause machine vibration.
If the movement amount per pulse becomes less than 1, also use the electronic
gear function of the drive unit and make setting so that the movement amount per
pulse is 1 or greater.
Pr.2
No. of pulses per rotation (Ap)
Set the number of pulses required for a complete rotation of the motor shaft.
If you are using the Mitsubishi servo amplifier MR-H, MR-J2/J2S
, or MR-C, set
the value given as the "resolution per servomotor rotation" in the speed/position
detector specifications.
No. of pulses per rotation (Ap) = Resolution per servomotor rotation
Since the "Resolution per servomotor revolution" of Mitsubishi servo amplifier MR-J2S
exceeds 65535 pulses, make setting after referring to the Servo Amplifier Instruction
Manual.
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
0.1 to 6553.5 (
µ
m)
1 to 65535 (
×
10
-1
µ
m)
1 : inch 0.0001 to 0.65535 (inch)
1 to 65535 (
×
10
-5
inch)
2 : degree 0.00001 to 0.65535 (degree)
1 to 65535 (
×
10
-5
degree)
3 : pulse 1 to 65535 (pulse) 1 to 65535 (pulse)
1 to 32767 : Set as a decimal
32768 to 65535 : Convert into hexadecimal and set
Pr.3
Movement amount per rotation (Al),
Pr.4
Unit magnification (Am)
The amount how the workpiece moves with one motor rotation is determined by
the mechanical structure.
If the worm gear lead (mm/rev) is PB and the deceleration rate is 1/n, then
Movement amount per rotation (AL) = PB
×
1/n