


















8 - 15
MELSEC-Q
8 OPR CONTROL
Restrictions
(1) Always limit the servomotor torque after the "
Pr.47
Creep speed" is reached. If the
torque is not limited, the servomotor may fail when the machine presses against the
stopper. (Refer to Section 12.4.2 "Torque limit function".)
(2) Use an external input signal as the zero signal.
(3) The OPR retry function cannot be used in "stopper stop method 3)".
Precautions during operation
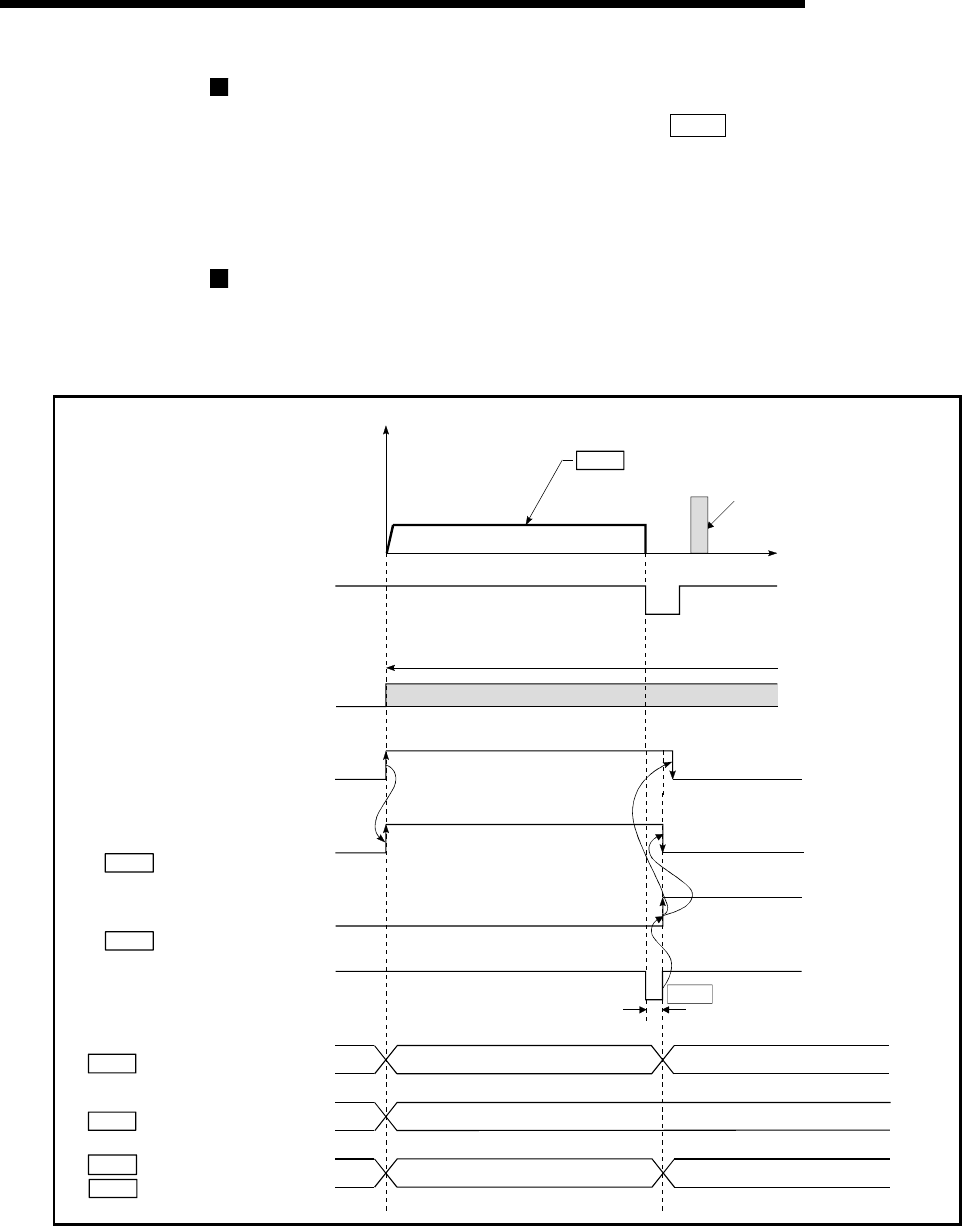
(1) If the zero signal is input before the workpiece stops at the stopper, the workpiece
will stop at that position, and that position will become the OP.
At this time an error will not occur.
t
ON
OFF
ON
OFF
OFF
ON
V
0
Pr. 47 Creep speed
Valid torque limit range
Machine OPR start
(Positioning start signal)
Md.26 Axis operation status
Value the machine moved is stored
OPR request flag
[ Md.31 Status : b3]
OPR complete flag
[ Md.31 Status : b4]
Md.34 Movement amount
after near-point dog ON
Md.20 Current feed value
OP address
Inconsistent
Standing by
In OPR
Inconsistent
Standing by
Md.21 Machine feed value
Torque limit
Zero signal
Deviation counter clear output
Stops at stopper
Pr.55 Deviation counter clear signal
output time
Fig. 8.11 When the zero signal is input before the stop at the stopper
(2) When a machine OPR is stopped with the stop signal, perform a machine OPR again.
If the restart command is turned ON after a stop with the stop signal, an error "OPR
restart not possible" (error code: 209) occurs.