



















12 - 41
MELSEC-Q
12 CONTROL SUB FUNCTIONS
12.5.2 Override function
The override function changes the command speed by a designated percentage (1 to
300%) for all control to be executed.
The speed can be changed by setting the percentage (%) by which the speed is
changed in "
Cd.13
Positioning operation speed override".
However, when a machine OPR is performed, an override cannot be made after a
deceleration start to the creep speed following the detection of near-point dog ON.
[1] Control details
[2] Precautions during control
[3] Setting the override function
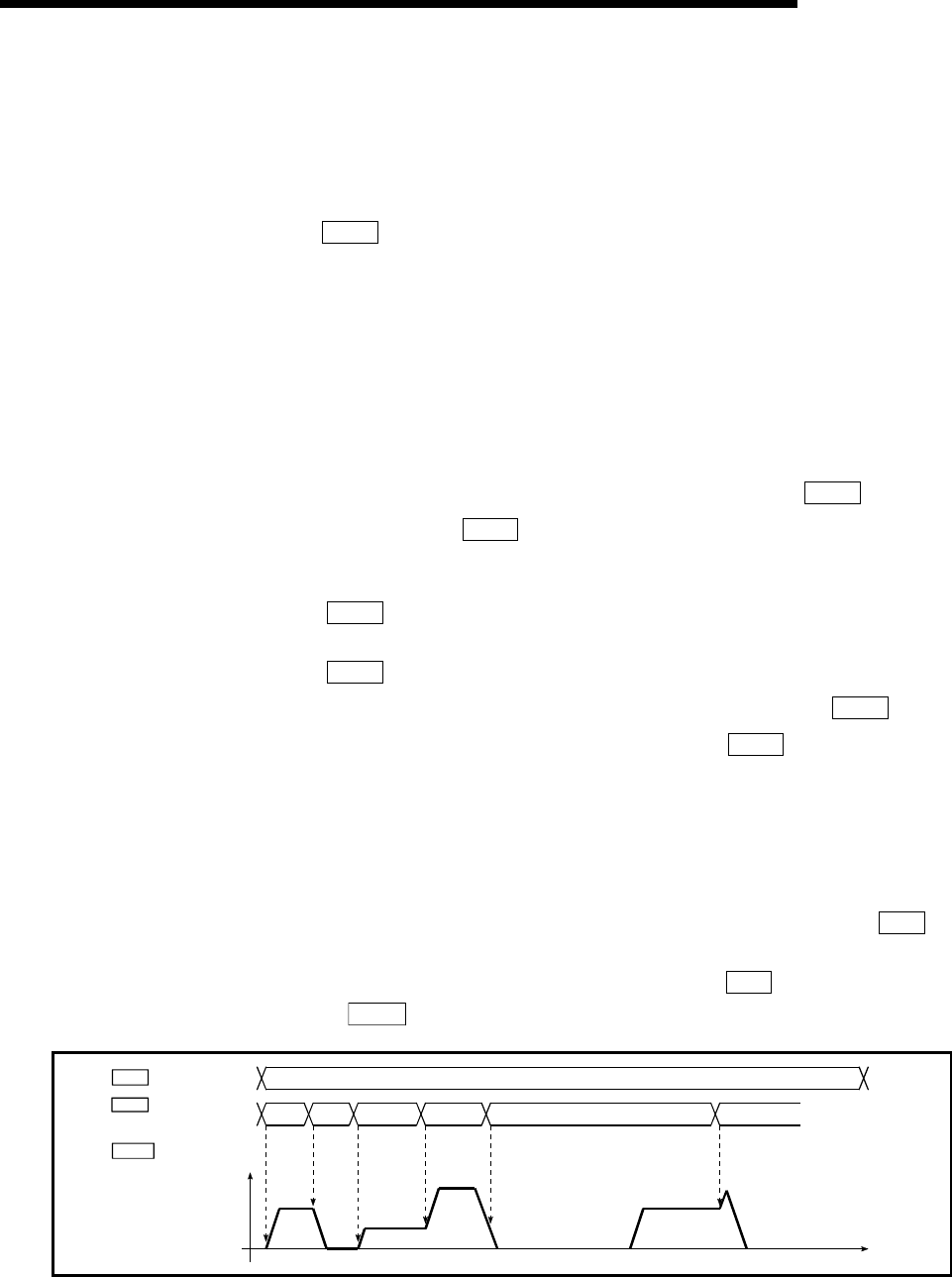
[1] Control details
The following shows that operation of the override function.
1) A value changed by the override function is monitored by "
Md.22
Feedrate". (When
Md.22
" becomes "0", the warning "Less than minimum
speed" (warning code: 110) is generated and the axis is controlled in the
then speed unit of "1".)
2) If "
Cd.13
Positioning operation speed override" is set to 100%, the speed
will not change.
3) If "
Cd.13
Positioning operation speed override" is set a value less than
100%, control will be carried out at speed unit "1" at the time "
Md.22
Feedrate" becomes a value of "1" or less. (When
Md.22
becomes "0", the
warning "Less than minimum speed (warning code: 110)" is generated and
the axis is controlled in the then speed unit of "1".)
4) If there is not enough remaining distance to change the speed when the
speed is changed during the position control of speed-position switching
control or position-speed switching control, the operation will be carried out
at the speed that could be changed.
5) If the speed changed by the "override function" is greater than the "
Pr.8
Speed limit value", a warning "Speed limit value over (warning code: 501)"
will occur and the speed will be controlled at the "
Pr.8
Speed limit value".
The "
Md.39
Speed limit flag" will turn ON.
Cd. 13
Da. 8 Command speed
Md. 22 Feedrate
100
1
50 150
100
200
50
50 1 25
75
50 75
Not affected by the override value
during deceleration
Not enough remaining
distance could be secured,
so operation is carried out
at an increased speed.
t
V
Positioning operation
speed override
Fig. 12.28 Override function operation