
















6 - 3
MELSEC-Q
6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL
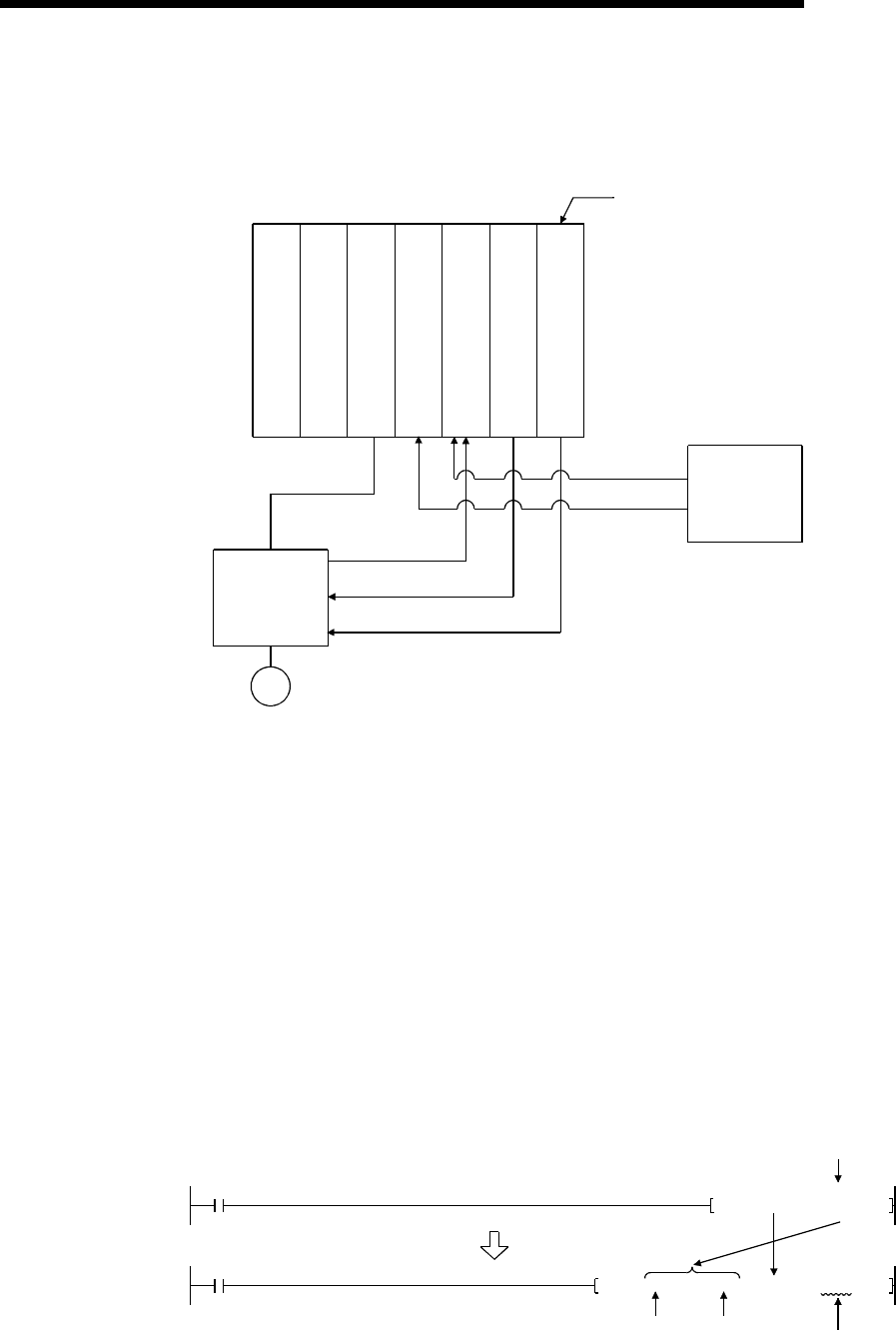
(4) System configuration
Unless particularly designated, the sequence program for the following system is
shown in this chapter and subsequent.
Refer to Section 6.2 for the application of the devices to be used.
External
devices
Q35B
Power supply module
Q
25
H
C
P
U
Q
D
75
P
4
Q
X
41
Q
X
40
Q
Y
40
Q
62
D
A
Servo-amplifier
M
Y50 to Y52
(for absolute position restoration)
CH.1 output (for torque changing)
X40 to X45
X20 to X3F
Servomotor
X47 to X49
(for absolute
position restoration)
00
1F
to
X20
X3F
to
X40
X4F
to
Y50
Y5F
to
60
6F
to
(5) Control unit
In the program, the unit of "0 (mm)" is set for the basic parameter 1.
(6) Communication with QD75
There are two methods for communication with QD75 using the sequence
program: a method using an "intelligent function device" and a method using a
FROM/TO command.
In the sequence program in this chapter and subsequent, the program example
using the "intelligent function device" is shown without using an FROM/TO
command for communication with QD75.
When using the FROM/TO command for communication with QD75, change the
circuit incorporating the "intelligent function device" as follows.
(a) When the circuit uses the "intelligent function device" on the destination (D)
side of a MOV command, change the command to a TO command.
MOVP K1 G1505
Intelligent function device
X21
TOP
K1
X21
K1505H0
K1
U0\
Designated
value
at U0
Designated
value
at G1505
Number of
write data (1)
0
0