


















1 - 21
MELSEC-Q
1 PRODUCT OUTLINE
1.2.4 Outline for restarting
When a stop cause has occurred during operation with position control causing the
axis to stop, positioning to the end point of the positioning data can be restarted from
the stopped position by using the "
Cd.6
Restart command".
If issued during a continuous positioning or continuous path control operation, the
restart command will cause the positioning to be re-executed using the
current position (pointed by the positioning data No. associated with the
moment when the movement was interrupted) as the start point.
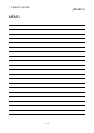
When "
Cd.6
Restart command" is ON
(1) If the "
Md.26
Axis operation status" is stopped, positioning to the end point of
the positioning data will be restarted from the stopped position regardless of
the absolute system or incremental system.
(2) When "
Md.26
Axis operation status" is not stopped, the warning "Restart not
possible" (warning code: 104) will be applied, and the restart command will be
ignored.
[Example for incremental system]
(a) The restart operation when the axis 1 movement amount is 300, and the
axis 2 movement amount is 600 is shown below.
Start point
address
Stop position due to stop cause
Designated end
point position
Axis 1
4
00
200
100
100 300 700
Axis 2
Stop position due to stop cause
Stop position
after restart
Axis 1
400
200
100
100 300 700
Axis 2
Restart
Operation during
restart
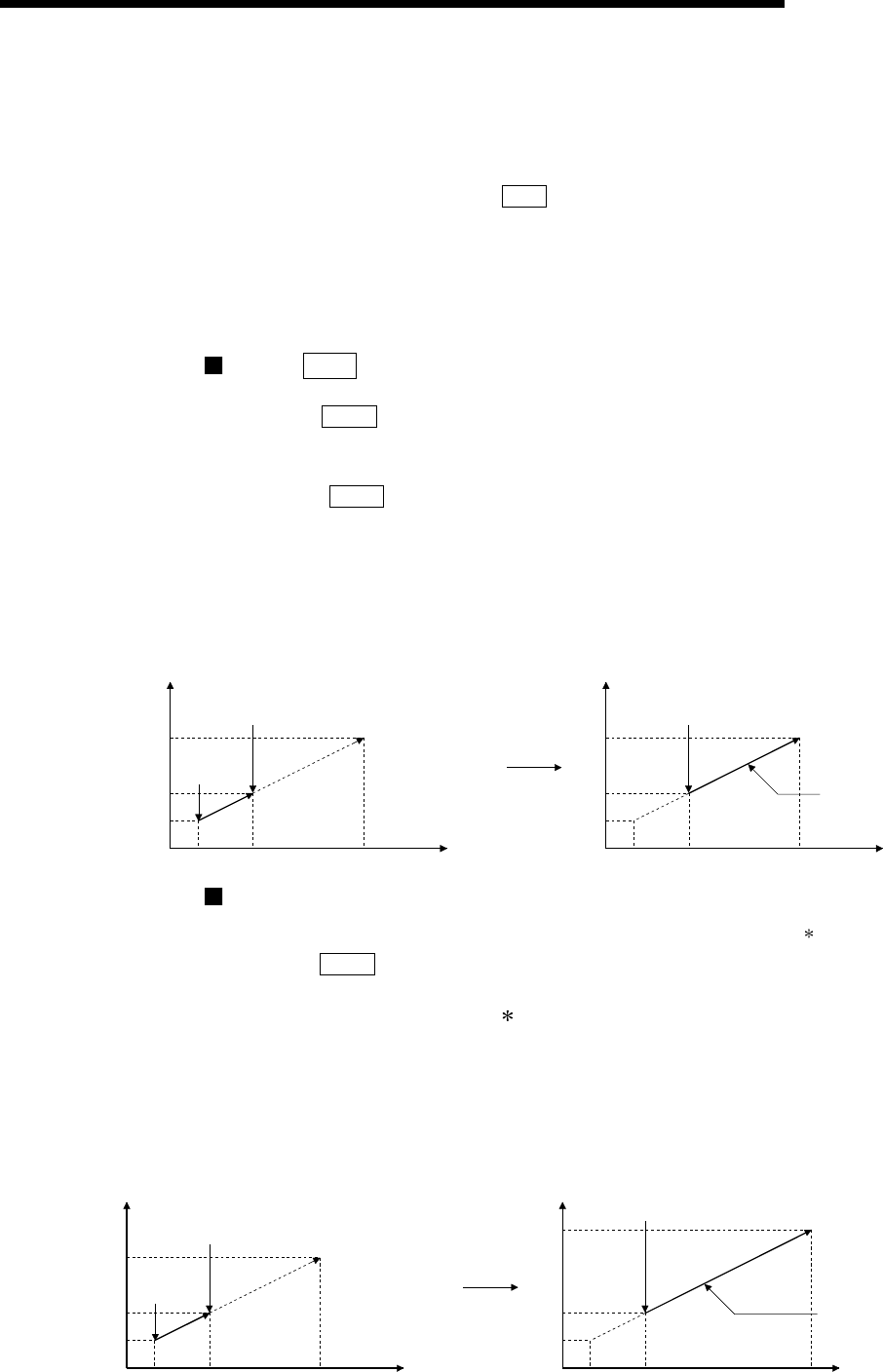
Reference
If the positioning start signal [Y10 to Y13]/external command signal is turned ON
while the "
Md.26
Axis operation status" is waiting or stopped, positioning will be
restarted from the start of the positioning start data regardless of the absolute
system or incremental system. (
: When the external command signal is set to
"External positioning start")
(Same as normal positioning.)
[Example for incremental system]
(a) The positioning start operation when the axis 1 movement amount is 300
and the axis 2 movement amount is 600 is shown below.
Start point
address
Stop position due to stop cause
Designated end
point position
Axis 1
4
00
200
100
100 300 700
Axis 2
Stop position due to stop cause
Stop position
after restart
Axis 1
500
200
100
100 300 900
Axis 2
Positioning
start
Operation during
positioning start