



















9 - 10
MELSEC-Q
9 MAJOR POSITIONING CONTROL
(b) When the operation pattern of the positioning data currently being
executed is "continuous path control: 11", and the movement amount
of the next positioning data is "0".
(c) During operation by step operation.
(Refer to Section 12.7.1 Step function".)
(d) When there is an error in the positioning data to carry out the next
operation.
POINTS
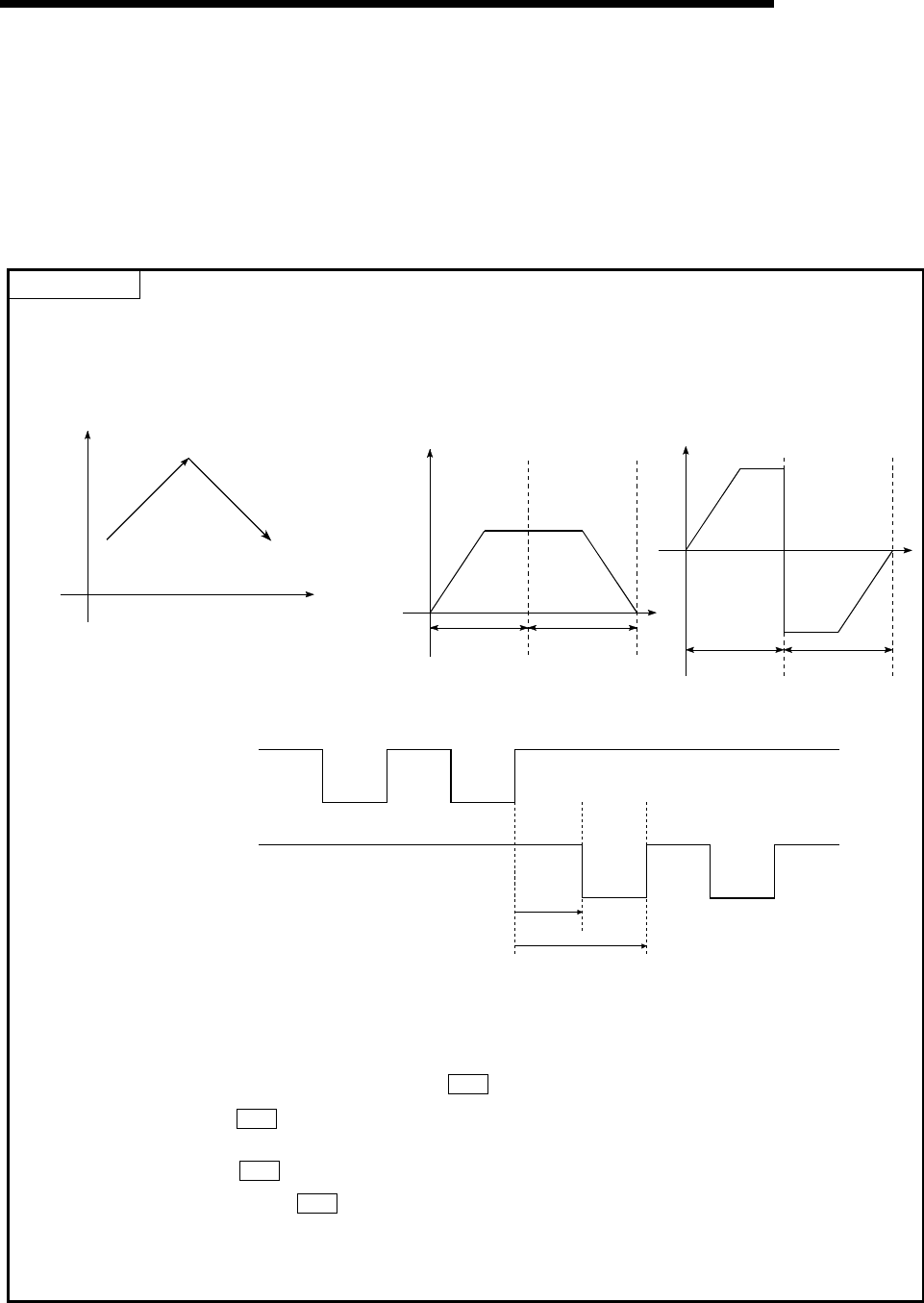
(1) The movement direction is not checked during interpolation operations. Thus, automatic deceleration to a stop will
not be carried out even if the movement direction is changed (See the figures below).
Because of this, the interpolation axis may suddenly reverse direction.
To avoid this sudden direction reversal in the interpolation axis, set the pass point to continuous positioning control
"01" instead of setting it to continuous path control "11".
[Positioning by interpolation] [Reference axis operation] [Interpolation axis operation]
Interpola-
tion axis
Positioning data
No.1
Reference axis
Positioning data
No.2
Positioning data No.1 • • • Continuous path control
V
Positioning data
No.1
t
Positioning data
No.2
V
Positioning data
No.1
t
Positioning data
No.2
(2) When the interpolation axis reveres direction suddenly, the command pulses from QD75 are output as shown in the
figure below.
Reverse run command
t1
t2
Forward run command
The t1 and t2 are calculated using the following expressions, where a command frequency is f (pps).
t1 = 1/2 f (s) t2 = 1/f (s)
A time of t1 must be maintained by the drive unit for a specified period T (s).
(T depends on the drive unit specifications.)
If t1 cannot be maintained for T or longer, lower the "
Da.8
Command speed" of the positioning data.
(3) When a "0" is set in the "
Da.6
Positioning address/movement amount" of the continuous path control positioning
data, the command speed of about 2 ms is reduced to 0.
When a "0" is set in the "
Da.6
Positioning address/movement amount" to increase the number of speed change
points in the future, change the "
Da.2
Control system" to the "NOP instruction" to make the control
nonexecutable.
(Refer to Section 9.2.20 "NOP instruction".)
(4) In the continuous path control positioning data, assure a movement distance so that the execution time with that
data is 100 ms or longer, or lower the command speed.