

















5 - 49
MELSEC-Q
5 DATA USED FOR POSITIONING CONTROL
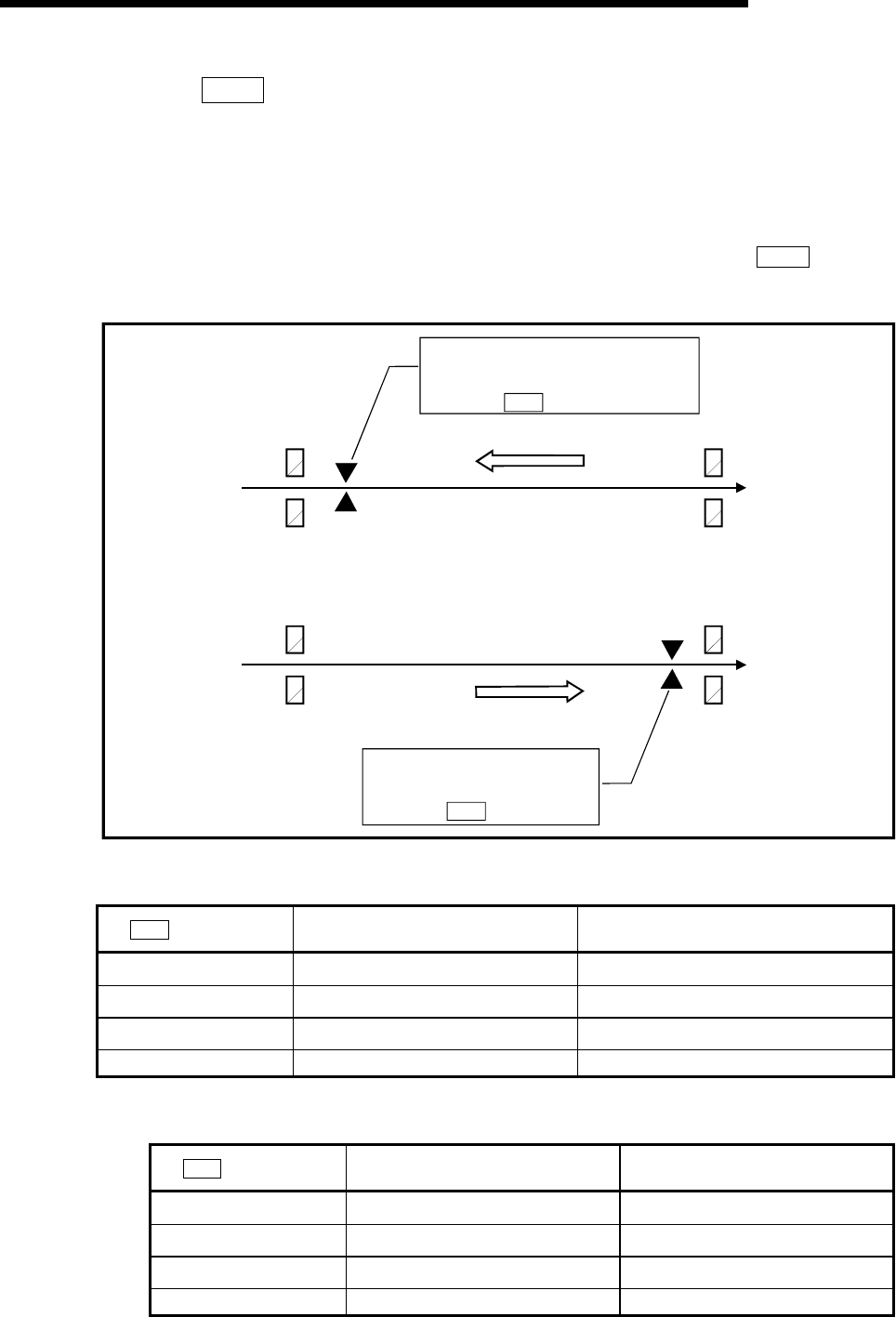
Pr.44
OPR direction
Set the direction to start movement when starting machine OPR.
0: Positive direction (address increment direction)
Moves in the direction that the address increments. (Arrow 2))
1: Negative direction (address decrement direction)
Moves in the direction that the address decrements. (Arrow 1))
Normally, the OP is set near the lower limit or the upper limit, so "
Pr.44
OPR
direction" is set as shown below.
Address decrement
direction
Lower limit
OP
Upper limit
Address increment
direction
1)
2)
Address decrement
direction
Lower limit
OP
Upper limit
Address increment
direction
When the OP is set at the upper
limit side, the OPR direction
is in the direction of arrow 2).
Set "0" for .
Pr.44
When the zero point is set at the lower
limit side, the OPR direction is in the
direction of arrow 1).
Set "1" for .
Pr.44
[Table 1]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm
-214748364.8 to 214748364.7 (
µ
m)
-2147483648 to 2147483647 (
×
10
-1
µ
m)
1 : inch -21474.83648 to 21474.83647 (inch)
-2147483648 to 2147483647 (
×
10
-5
inch)
2 : degree 0 to 359.99999 (degree)
0 to 35999999 (
×
10
-5
degree)
3 : pulse -2147483648 to 2147483647 (pulse) -2147483648 to 2147483647 (pulse)
[Table 2]
Pr.1
setting value
Value set with peripheral device
(unit)
Value set with sequence program
(unit)
0 : mm 0.01 to 20000000.00 (mm/min)
1 to 2000000000 (
×
10
-2
mm/min)
1 : inch 0.001 to 2000000.000 (inch/min)
1 to 2000000000 (
×
10
-3
inch/min)
2 : degree 0.001 to 2000000.000 (degree/min)
1 to 2000000000 (
×
10
-3
degree/min)
3 : pulse 1 to 1000000 (pulse/s) 1 to 1000000 (pulse/s)