



















12 - 56
MELSEC-Q
12 CONTROL SUB FUNCTIONS
Example 2.
(1) Using Expression 1, calculate the positioning address which can be specified
in the system where the OP address in Example 1 is 214740000.0 (µm).
•
Lower limit value of positioning address
(Positioning address) =0.1
(-268435456) + 214740000.0
=187896454.4 (µm)
•
Upper limit value of positioning address
(Positioning address) =0.1
268435456 + 214740000.0
=241583545.5 (µm)
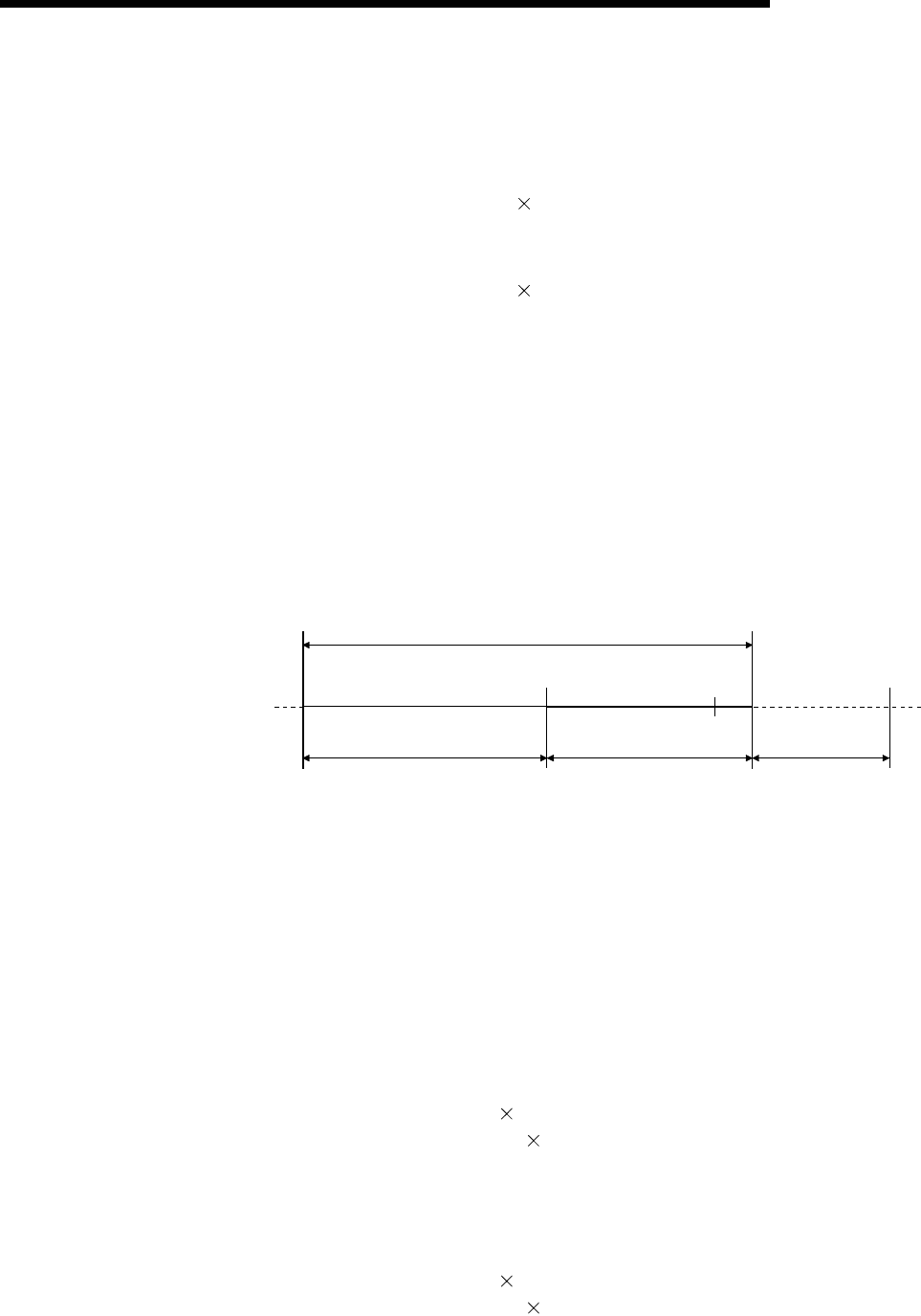
(2) Since the lower limit value of the positioning address calculated is within the
range of Condition 2, the calculated address 187896454.4 (µm) is the lower
limit for positioning in the absolute position detection system.
Since the upper limit of the positioning address calculated is outside of the
range of Condition 2, the upper limit value 214748364.7 (µm) is the upper
limit for positioning in the absolute position detection system.
In the absolute position detection system, use the positioning address within
the range 187896454.4 (µm) to 214748364.7 (µm).
Positioning in excess of 187896454.4 (µm) cannot be used in the absolute
position detection system.
Unit: µm
(OP)
-214748364.8 214748364.7
Setting disallowed
Usable range in absolute
position detection system
Unusable range in absolute
position detection system
Positioning address specifying range
241583545.5214740000.0187896454.4
Example 3.
(1) There are the following conditions to calculate the positioning address:
•
Movement amount per pulse: 0.9 (µm)
•
OP address: 0.0 (µm)
•
Feedback pulses = 8192 (pulse)
(2) Calculate the positioning address from the output pulse count using range in
Condition 1 and the positioning address calculation expression (Expression
1).
•
Lower limit value of positioning address (the number of negative pulses in
Condition 1 is used for calculation)
(Positioning address) = (Movement amount per pulse)
(number of output pulses) + (OP address)
= 0.9
(-268435456) + 0.0
= -241591910.4 (µm)
•
Upper limit value of positioning address (the number of positive pulses in
Condition 1 is used for calculation)
(Positioning address) = (Movement amount per pulse)
(number of output pulses) + (OP address)
= 0.9
268435455 + 0.0
= 241591909.5 (µm)