


















9 - 3
MELSEC-Q
9 MAJOR POSITIONING CONTROL
Major positioning control
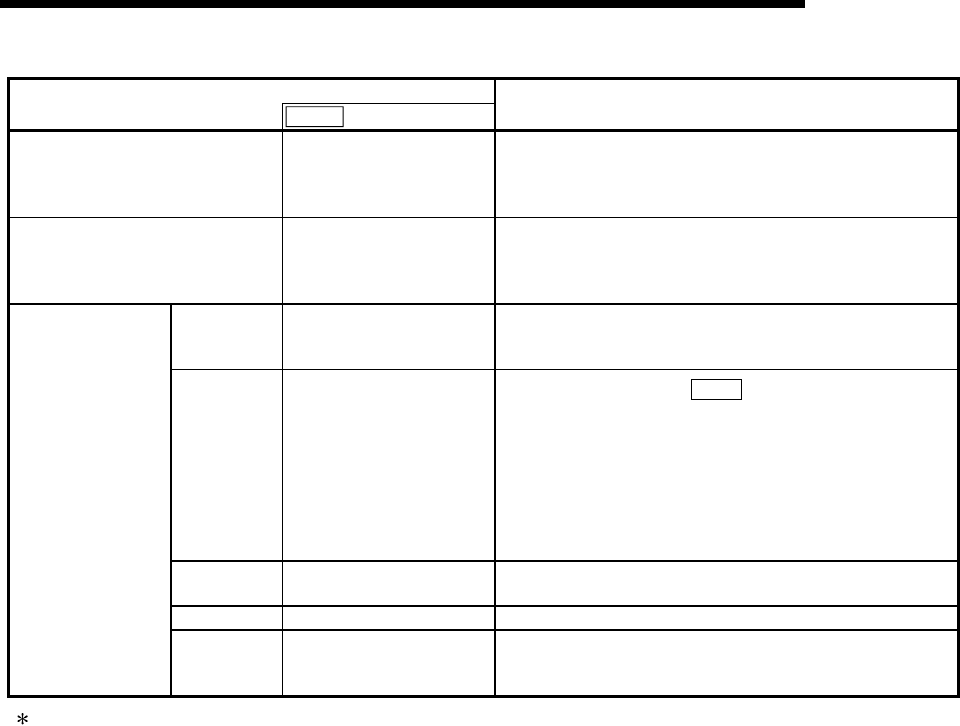
Da.2 Control system
Details
Speed-position switching control
Forward run
speed/position
Reverse run
speed/position
The control is continued as position control (positioning for
the designated address or movement amount) by turning
ON the "speed-position switching signal" after first carrying
out speed control.
Position-speed switching control
Forward run
position/speed
Reverse run
position/speed
The control is continued as speed control by turning ON
the "position-speed switching signal" after first carrying out
position control.
NOP
instruction
NOP instruction
A nonexecutable control system. When this instruction is
set, the operation is transferred to the next data operation,
and the instruction is not executed.
Current value
changing
Current value changing
The current feed value (
Md.20
) is changed to an address
set in the positioning data.
This can be carried out by either of the following 2
methods.
(The machine feed value cannot be changed.)
•
Current value changing using the control system
•
Current value changing using the current value
changing start No. (No. 9003).
JUMP
instruction
JUMP instruction
An unconditional or conditional JUMP is carried out to a
designated positioning data No.
LOOP LOOP A repeat control is carried out by repeat LOOP to LEND.
Other control
LEND LEND
Control is returned to the top of the repeat control by
repeat LOOP to LEND. After the repeat operation is
completed specified times, the next positioning data is run.
In "2-axis linear interpolation control", "3-axis linear interpolation control", "4-axis linear interpolation control", "2-axis
fixed-feed control", "3-axis fixed-feed control", "4-axis fixed-feed control", "2-axis circular interpolation control", "2-axis
speed control", "3-axis speed control" and "4-axis speed control", control is carried out so that linear and arc paths are
drawn using a motor set in two or more axes directions. This kind of control is called "interpolation control". (Refer to
Section 9.1.6 "Interpolation control" for details.)