


















1 - 7
1 OVERVIEW
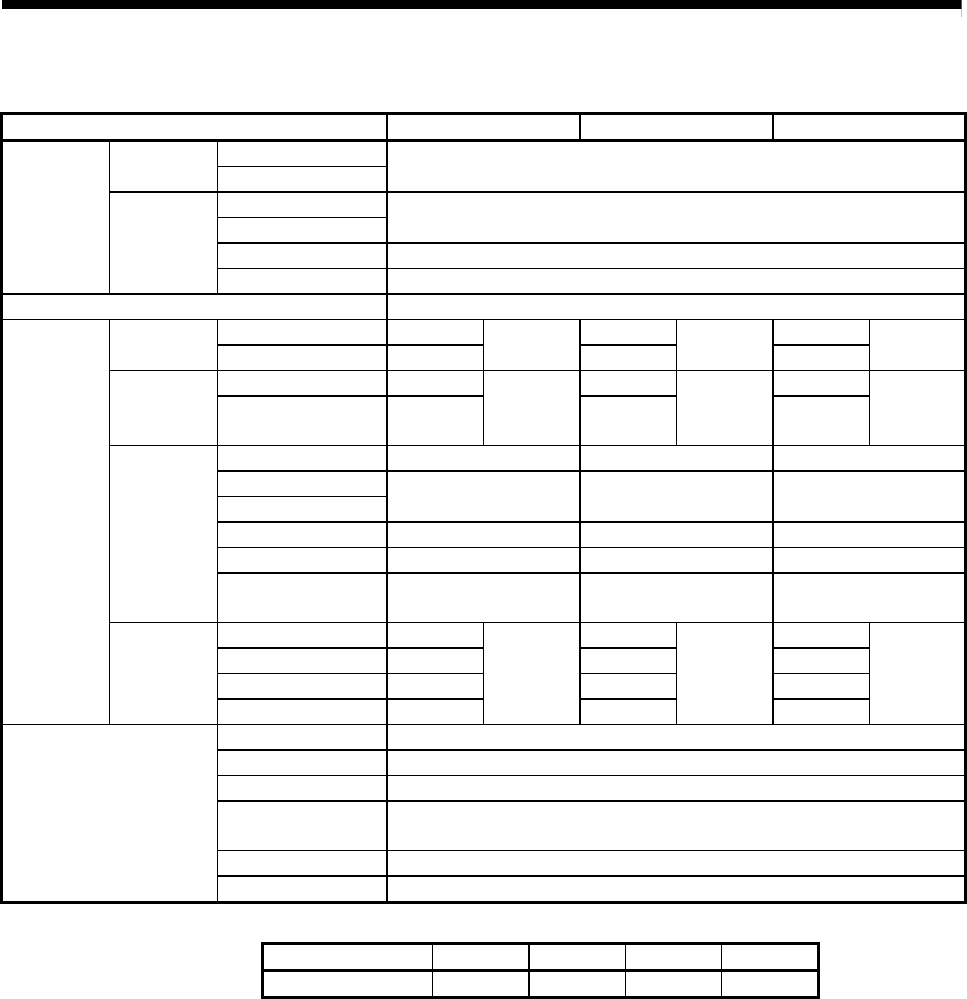
(4) Comparison of Mechanical system program specifications
Item Q170MCPU Q173DCPU Q172DCPU
Virtual servomotor
Drive module
Synchronous encoder
PLS
Roller
Ball screw
mm, inch
Rotary table degree
Control units
Output
module
Cam mm, inch, PLS
Program language Dedicated instructions (Servo program + mechanical system program)
Virtual servomotor 16 32 8
Drive module
Synchronous encoder 8
Total 24
32
Total 44
8
Total 16
Virtual main shaft 16 32 8
Virtual axis
Virtual auxiliary input
axis
16
Total 32
32
Total 64
8
Total 16
Gear 32 64 16
Direct clutch
Smoothing clutch
32 64 16
Speed change gear 32 64 16
Differential gear 16 32 8
Transmission
module
Differential gear to
main shaft
16 32 8
Roller 16 32 8
Ball screw 16 32 8
Rotary table 16 32 8
Number of
modules
which can be
set per CPU
Output
module
Cam 16
Total 16
32
Total 32
8
Total 8
Types
Up to 256
(Note-1)
Resolution per cycle
256 • 512 • 1024 • 2048
(Note-1)
Memory capacity 132k bytes
Storage memory for
cam data
CPU internal RAM memory
Stroke resolution 32767
Cam
Control mode Two-way cam/feed cam
(Note-1): Relation between a resolution per cycle of cam and type are shown below.
Resolution per cycle 256 512 1024 2048
Type 256 128 64 32