


















5 - 4
5 START-UP PROCEDURES
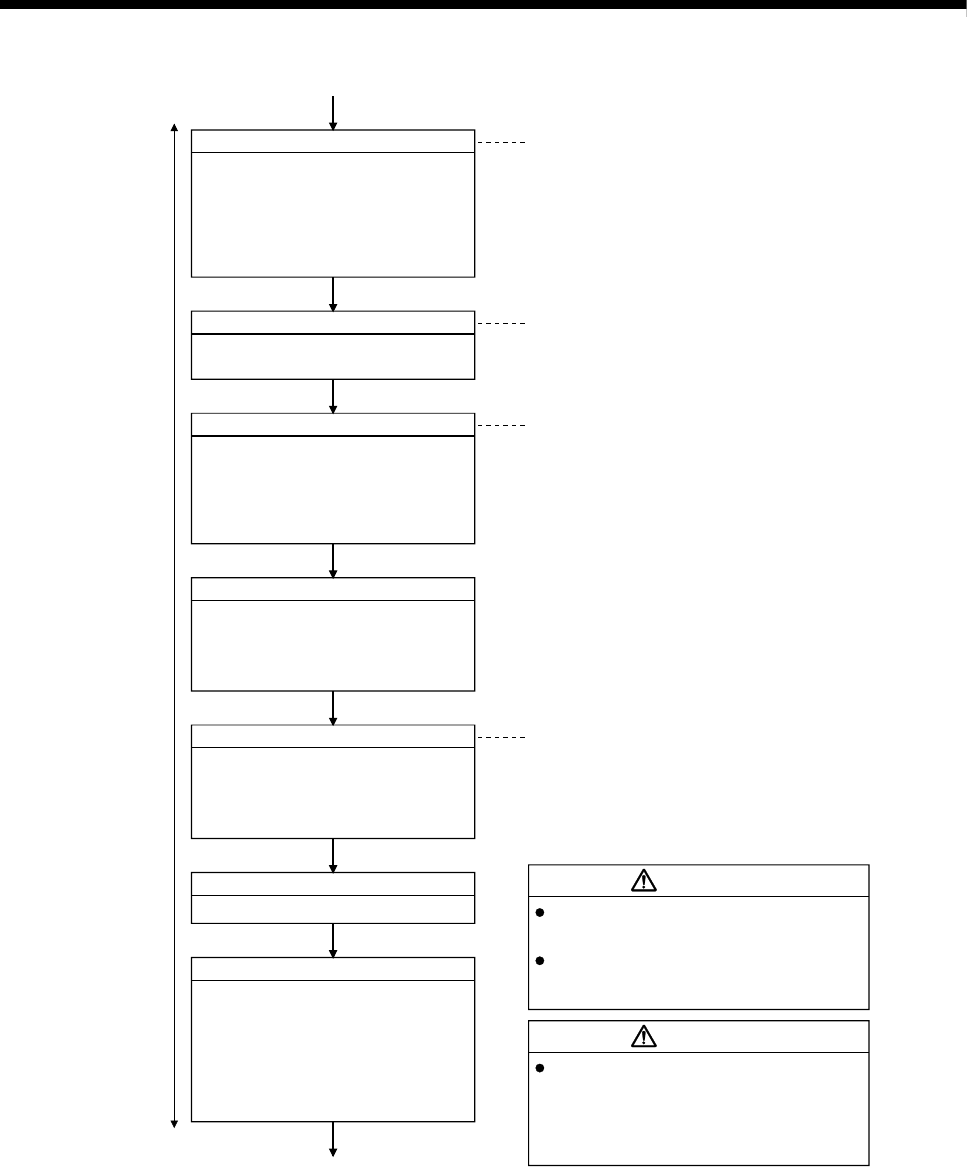
1)
Refer to Section 2.5.3
Check external inputs to Q172DLX
Check the wiring of following external inputs
by monitoring of MT Developer2.
(1) FLS (Upper stroke limit input)
(2) RLS (Lower stroke limit input)
(3) STOP (Stop signal)
(4) DOG (Proximity dog)
Motion CPU
area
Set parameter values to those that are compatible
with the Motion controller, servo amplifier,
servo motor and regenerative resistor model name
and the system name application.
The protective functions may not function if the
settings are incorrect.
Do not mount a phase advancing capacitor, surge
absorber or radio noise filter (option FR-BIF) on
the output side of the servo amplifier.
Correctly connect the output side (terminal U, V,
W). Incorrect connections will lead the servo motor
to operate abnormally.
Check the wiring of following external inputs
by monitoring of MT Developer2 or LED
indicators.
(1) Manual pulse generator/incremental
synchronous encoder setting
Refer to Section 2.5.4
Check external inputs to Q173DPX
Check I/O module
Check the wiring of I/O modules.
CAUTION
CAUTION
Set the following positioning parameters
using MT Developer2.
(1) Fixed parameters
(2) Home position return data
(3) JOG operation data
(4) Servo parameters
(5) Parameter block
(6) Limit output data
Positioning parameters setting
[Servo data setting]
2)
Check servo external inputs signal
Check the wiring of servo external input
signals by monitoring of MT Developer2.
(1) FLS (Upper stroke limit input)
(2) RLS (Lower stroke limit input)
(3) DOG (Proximity dog)
Refer to Section 2.5.1
Check pulse input signal of internal I/F
Check the wiring of pulse input signals of
internal I/F by monitoring of MT Developer2.
(1) Check that the current value storage
register (D1120, D1121) counts when
a manual pulse generator or
incremental synchronous encoder is
used.
Check I/O signal of internal I/F
Check the wiring of I/O signals of internal
I/F.
Refer to Section 2.5.1