



















APP - 33
A
PPENDICES
(d) Mark detection data
Set the data to latch at mark detection.
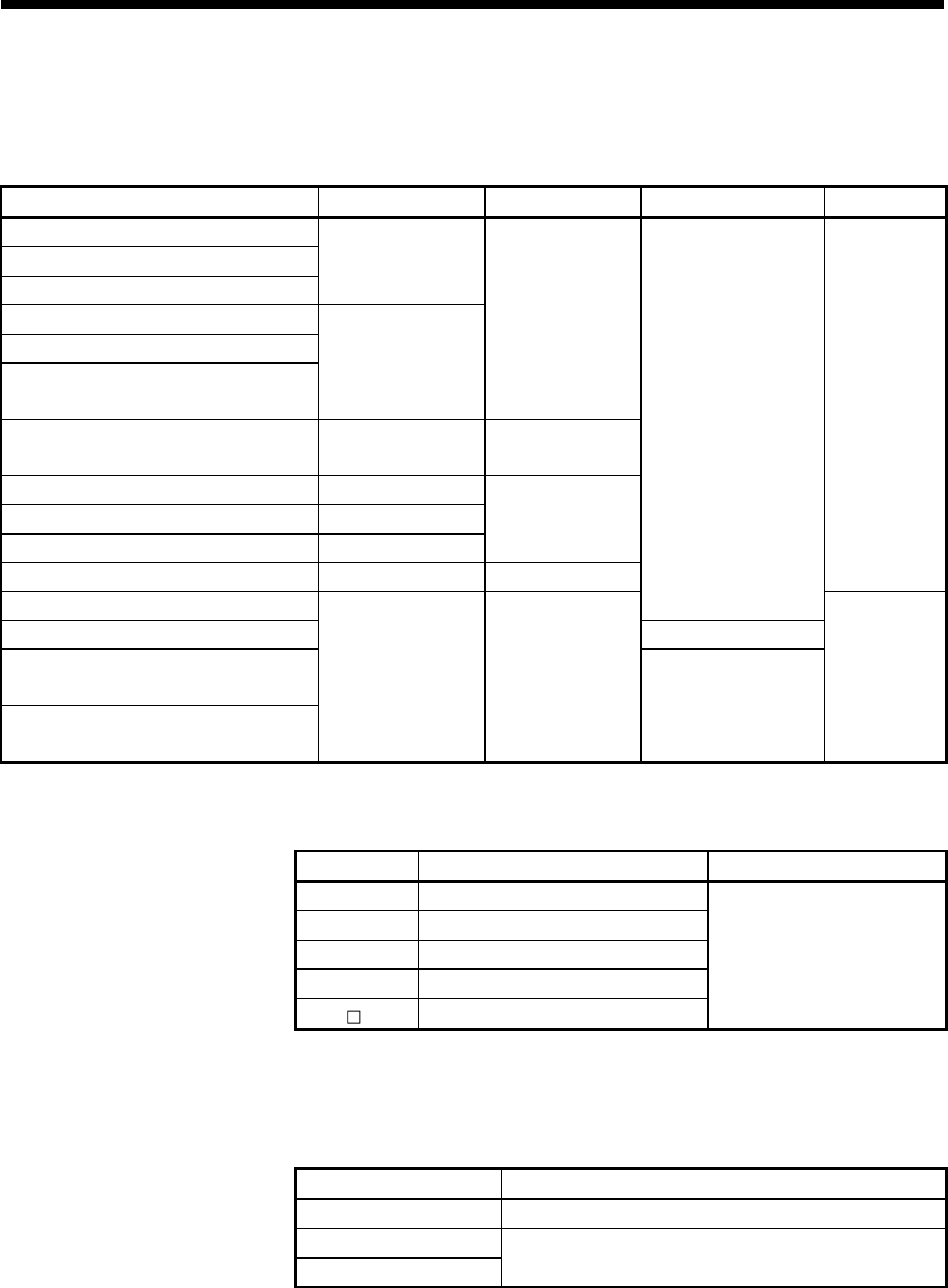
1) Motion control data
Item Unit Data type Axis No. setting range Remarks
Feed current value
Real current value
Motor real current value
10
-1
[µm], 10
-5
[inch],
10
-5
[degree], [PLS]
Servo command value
Position feed back
Absolute position encoder within one-
revolution position
[PLS]
32-bit integer type
Absolute position encoder within multi-
revolution position
— 16-bit integer type
Deviation counter value [PLS]
Servo command speed [PLS/s]
Motor speed 0.01[r/min]
32-bit integer type
Motor current 0.1[%] 16-bit integer type
—
Virtual servomotor feed current value
1 to 16
Synchronous encoder current value 1 to 8
Current value within one cam shaft
revolution
Current value within one cam shaft
revolution (Actual)
(Note)
[PLS] 32-bit integer type
1 to 16
Valid in SV22
virtual mode
only
(Note): Current value within one cam shaft revolution takes into consideration the delay of the servo amplifier.
2) Word device data
Word device Setting range Remarks
D 0 to 8191
W 0 to 1FFF
# 0 to 9215
SD 0 to 1999
U \G
10000 to (10000+p-1)
(Note-1)
—
(Note-1): "p" indicates the user setting area points of the Multiple CPU high speed transmission
area for each CPU.
3) Data type
Set the data at word device data setting.
Data type Remarks
16-bit integer type —
32-bit integer type
64-bit floating-point type
Set the device No. as an even No.