End of Arm Tooling Load Definitions
AdeptSix 300CR Robot Instruction Handbook, Rev. A 53
5.3 End of Arm Tooling Load Definitions
The end of arm tooling payload includes weight, location of the center of gravity, and the
moment of inertia at the center of gravity of the installed tool. See Figure 5-3.
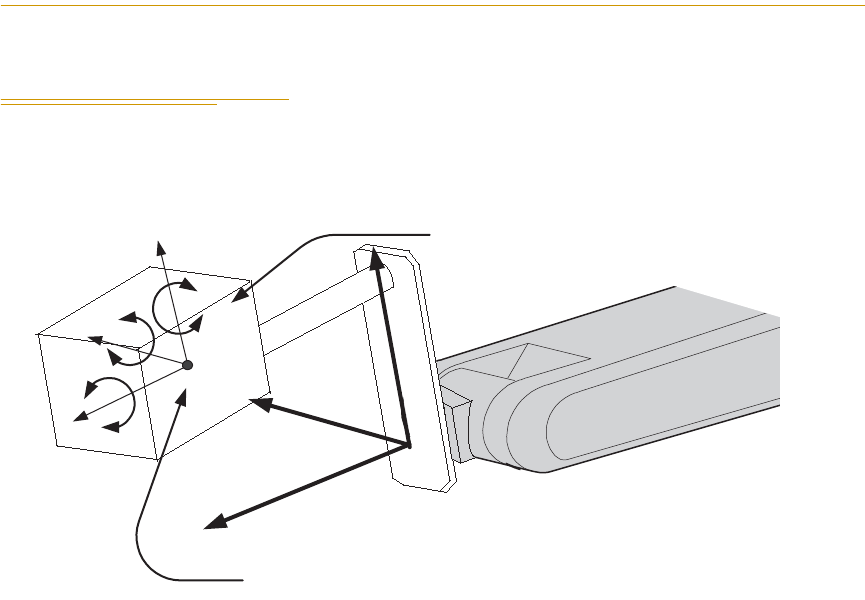
Figure 5-3. Center of Gravity: Calculating Tool Load Information
Weight: W (kg)
The total weight of the installed tooling is set based on the above calculations.
For rough calculations, set a slightly larger value and keep increasing the value for each
unit by 0.5 to 1 kg for small to medium size robots; for larger robots, increase the value by
0.5 to 5 kg units.
Center of Gravity: xg, yg, zg (mm)
The location of the center of gravity of the installed tool is set based on the position of the
tool flange coordinates.
Moment of inertia at the center of gravity: lx, ly, lz (kg.m²)
This is the moment of inertia of the tool based on the location of the center of gravity. The
value is calculated around each axis of the coordinate system, which is in parallel to the
flange coordinates, with its origin at the center of gravity of the tool.
This is used to calculate the moment of inertia and provide verification based on the
arm-specification requirements. The moment of inertia is typically not critical; in many
cases, calculated moment of inertia values are small, based on the payload and the center
of gravity. However, this is extremely critical when either the payload, or specifically the
moment of inertia, is exceeded. This condition has a drastic impact on arm performance
and reliability. See Figure 5-4.
* Flange Coordinates
XF: Direction right above when Axis 6 (T axis)
is at 0 pulse position and the flange surface
of the robot is turned to the front.
YF: Y axis led by XF, ZF
ZF: Perpendicular direction from flange surface
Center of Gravity Position
(Xg, Yg, Zg)
Inertia moment around center of gravity
Ix, Iy, Iz
Weight: W
XF
ZF
YF
XF*
ZF*
YF*
Iy
Iz
Ix











































































































