



















®
Chapter 1 Overview of PID control
4 CNT-APG002-EN
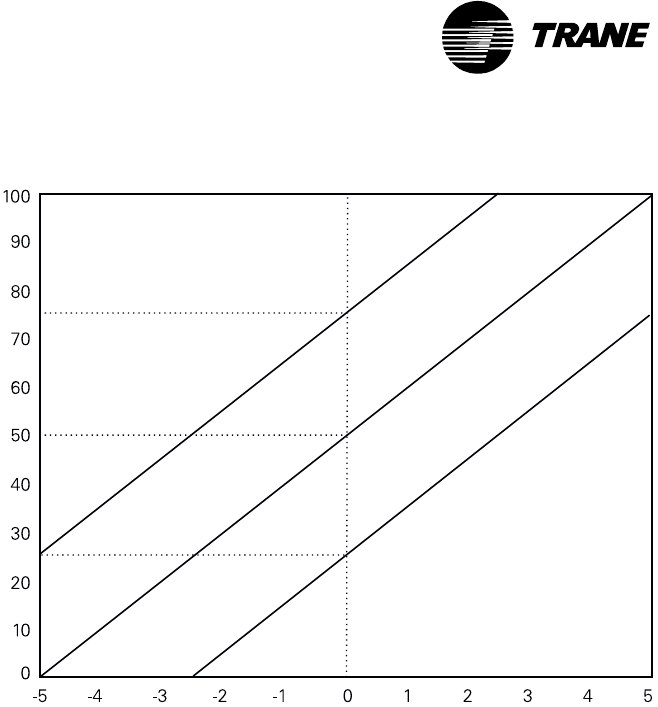
Figure 4: The effects of proportional bias on system output
Integral calculation
The integral calculation responds to the length of time the measured vari-
able is not at setpoint. The longer the measured variable is not at set-
point, the larger the output of the integral calculation.
The integral calculation uses the sum of past errors to maintain an out-
put when the error is zero. Line 1 in Figure 5 on page 5 shows that with
proportional-only control, when the error becomes zero, the PID output
also goes to zero (assuming a proportional bias of zero). Line 2 shows the
integral output added to the proportional output. Because the integral
calculation is the sum of past errors, the output remains steady rather
than dropping to zero when the error is zero. The benefit of this is that
the integral calculation keeps the output at an appropriate level to main-
tain an error of zero.
Controller output (%)
Error
Proportional bias = 25
Proportional bias = 50
Proportional bias = 75