



















®
Chapter 1 Overview of PID control
6 CNT-APG002-EN
Because of these disadvantages, derivative control is rarely used in HVAC
applications (with the exception of steam valve controllers and static
pressure control).
Derivative control can affect the output in two ways: it slows the output if
the derivative gain is negative and increases the output if the derivative
gain is positive.
Slowing (or smoothing) the actuator motion, sometimes known as
dynamic braking, can help if there are many quick changes in the input
signal. For example, a robot arm moves quickly in mid-motion, but the
derivative calculation slows it down at the end of the motion.
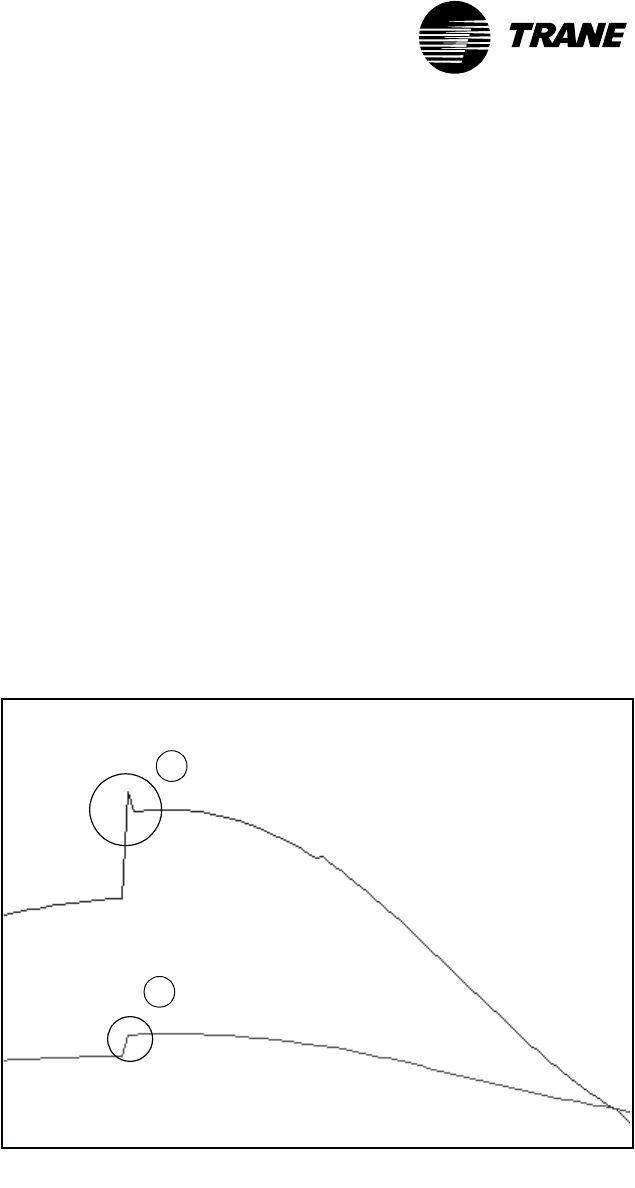
The opposite effect occurs when the derivative gain is positive. The out-
put reacts faster to a change in error, resulting in a steeper climb or
descent to setpoint. The circled areas in Figure 6 illustrate this effect.
Line 1 shows the error without a derivative gain. Line 2 shows the error
with a positive derivative gain. The circled sections show what happens
during a rapid change in error. Note the spike in line 2 as the system
recovers from the effect of derivative control during a sharp change in
error. The spike indicates a forceful actuator motion, which is useful for
applications such as controlling steam valves.
Figure 6: The effect of positive derivative gain
Proportional gain ≠ 0
Derivative gain > 0
Proportional gain
≠ 0
Derivative gain = 0
1
2
Time
Output