Velocity model
CNT-APG002-EN 7
Velocity model
Trane controllers use a type of PID control known as the velocity model.
The velocity model minimizes the problem of integral windup, which
occurs when the sum of past errors in the integral calculation is too great
to allow the controller to change the output at one of the extremes (see
“Integral calculation” on page 4).
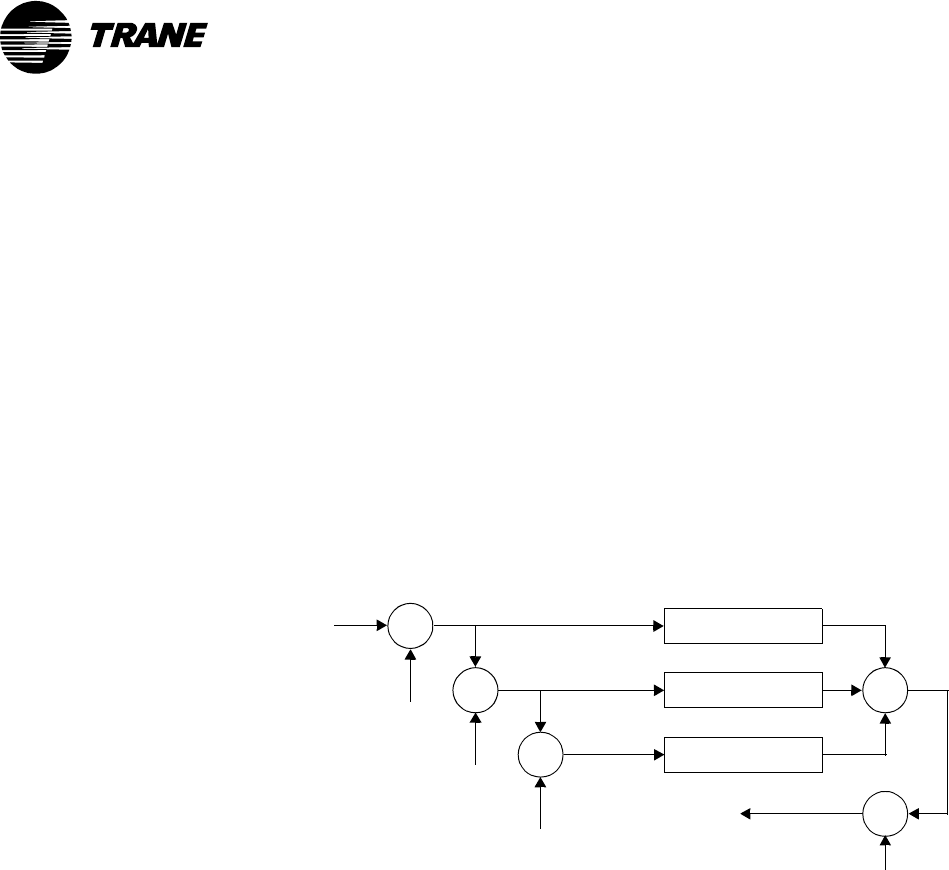
The velocity model, illustrated in Figure 7, gets its name from the fact
that the proportional gain affects the change in error (or error velocity)
instead of the error, as in a classic PID model. In the velocity model, the
error is multiplied by the integral gain, and the change in error is multi-
plied by the proportional gain. When the error gets close to zero, the
change in error gets close to zero as well. So both the integral and propor-
tional gains are multiplied by a number close to zero. This forces the out-
put of the PID calculation to stop changing when the error becomes zero,
minimizing (but not eliminating) integral windup.
Figure 7: Velocity model
Σ
Integral gain
Setpoint
Proportional gain
Measured
variable
Error(n)
+
Σ
+
+
Σ
Σ
∆
2
error(n)
Derivative gain
+
+
∆error(n)
∆error(n-1)
Error(n-1)
–
+
Σ
∆output(n)
+
+
PID output
PID output(n-1)
–
–







































































