



















PID calculations
CNT-APG002-EN 3
®
PID calculations
A PID loop performs three calculations: the proportional calculation, the
integral calculation, and the derivative calculation. These calculations
are independent of each other but are combined to determine the
response of the controller to the error.
Proportional calculation
The proportional calculation responds to how far the measured variable is
from the setpoint. The larger the error, the larger the output of the calcu-
lation. The proportional calculation has a much stronger effect on the
result of the PID calculation than either the integral or derivative calcu-
lations. It determines the responsiveness (or aggressiveness) of a control
system. Though some systems use only proportional control, most Trane
controllers use a combination of proportional and integral control.
Proportional-only control (a method of control that does not use the inte-
gral and derivative contributions) is traditionally used in pneumatic con-
trollers. It may be used in staging applications because it can be simpler
to manage than full PID control. The programmable control module
(PCM) and the universal programmable control module (UPCM) assume
proportional-only control when the integral and derivative gains are set
to zero. Tracer MP580/581 controllers have a unique setting for propor-
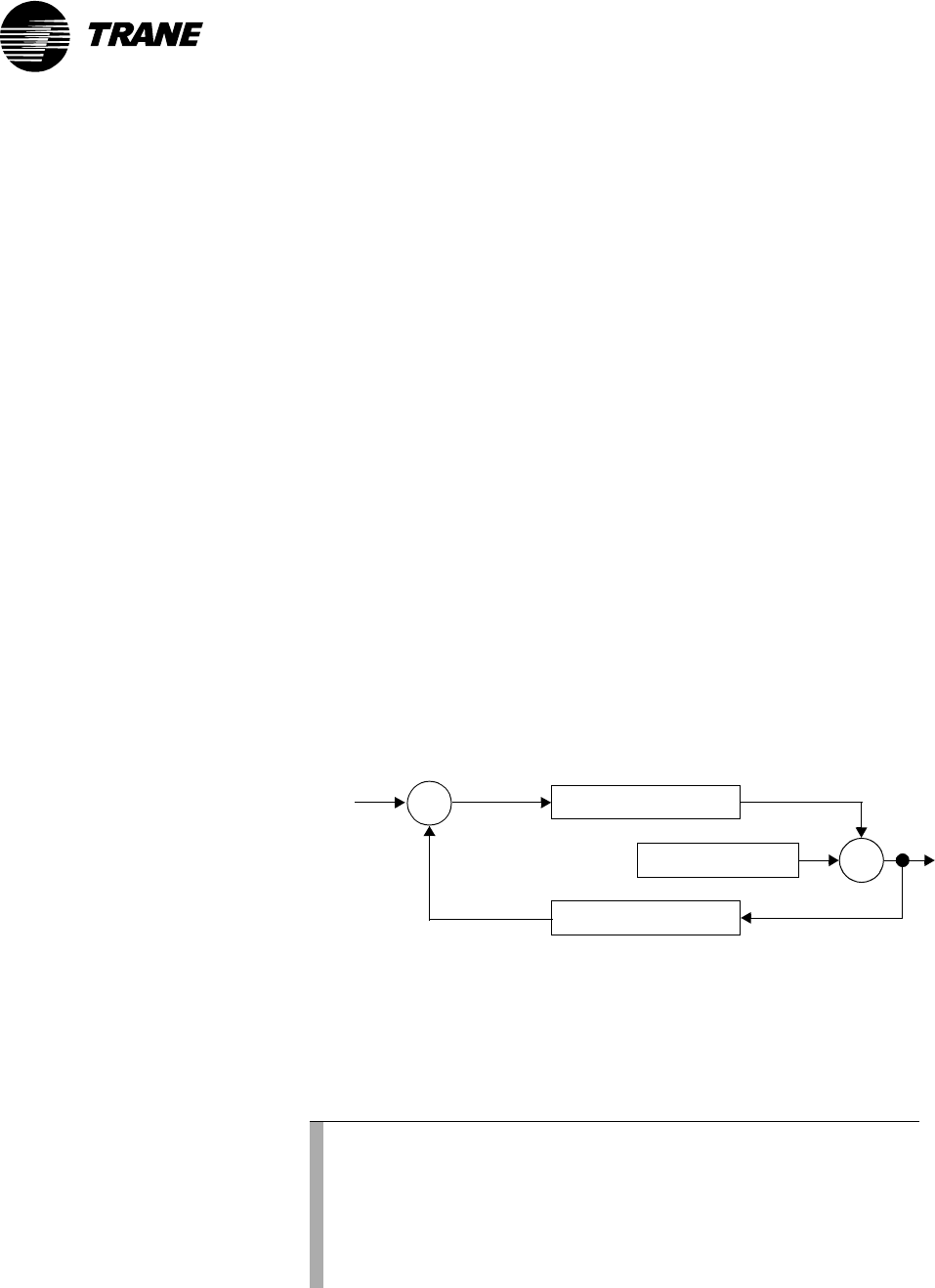
tional-only control. Figure 3 illustrates proportional-only control.
Figure 3: Proportional-only control
One difference between proportional-only control and classic PID control
is the use of proportional bias. The proportional bias becomes the output
when the error is zero. Thus, you can use the proportional bias to cali-
brate a controller to some known output. Figure 4 on page 4 shows the
effect of proportional bias on PID output. Notice that when the error is
zero, the output is equal to the proportional bias.
Σ
Proportional gain
Setpoint
Conversion function
System
output
Proportional bias
Measured
variable
Error(n)
+
–
Σ
+
+
Note:
The integral calculation automates the process of setting pro-
portional bias. In proportional-only control, the proportional
bias lets you decide what the output should be when the error is
zero; in PID control, the integral calculation maintains the cur-
rent output when the error is zero (see “Integral calculation” on
page 4).