



















Action
CNT-APG002-EN 17
®
Action
The action of a PID loop determines how it reacts to a change in the mea-
sured variable (such as a room temperature). A controller using direct
action increases the output when the measured variable increases. A con-
troller using reverse action decreases the output when the measured vari-
able increases.
Direct action
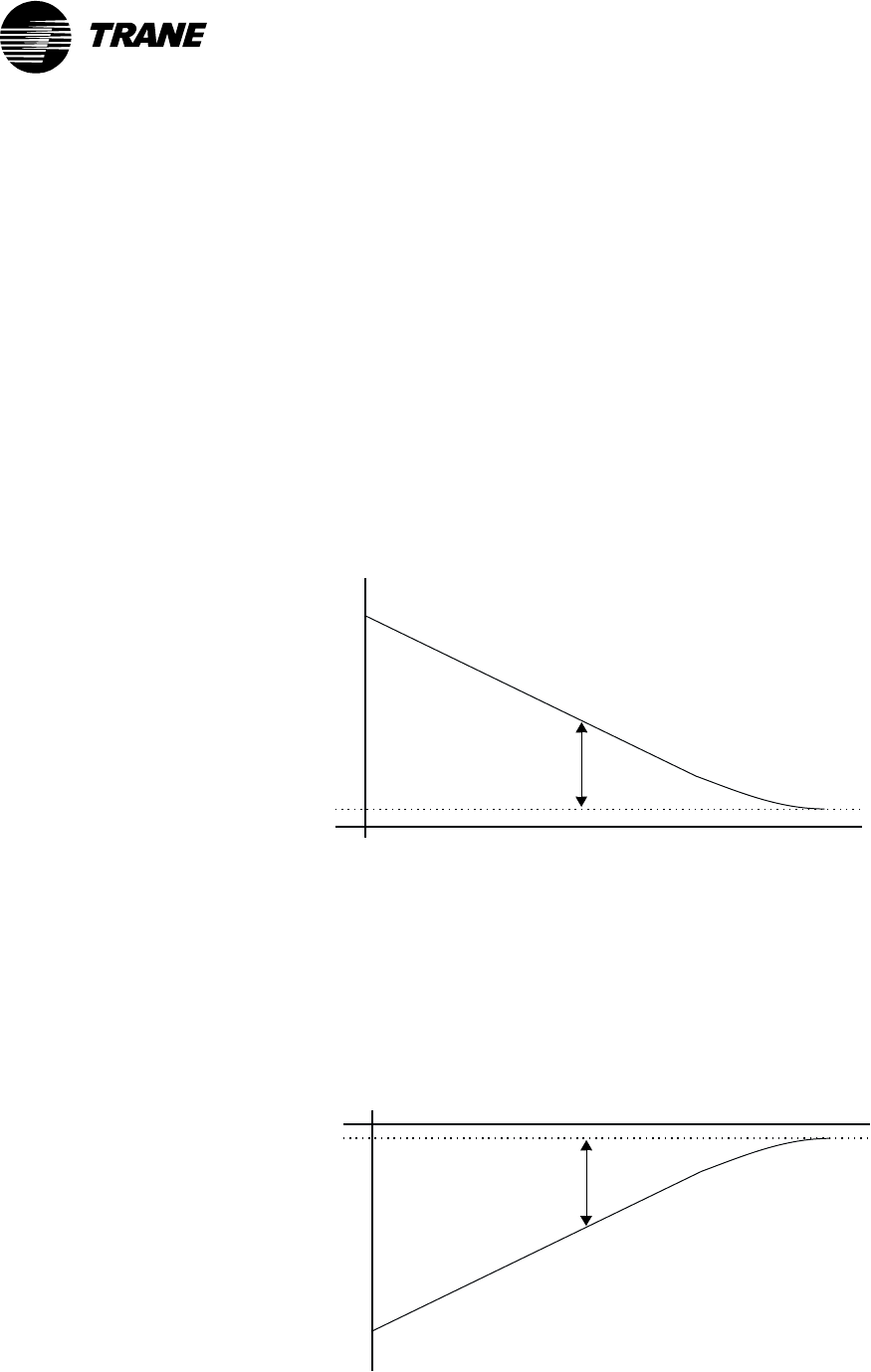
Figure 14 shows the temperature when a system is cooling a space. When
the error is large and the PID output is at 100%, the actuator and valve
combination are fully open. As the measured variable (room temperature)
decreases, the error becomes smaller, and the controller closes the valve
to reduce or stop cooling. Because the PID output and measured variable
move in the same direction (both decreasing), the loop is direct acting.
Figure 14: Cooling a space
Reverse action
Figure 15 shows the temperature when a system is heating a space.
When the error is large and the PID output is at 100%, the actuator and
valve combination are fully open. When the measured variable (room
temperature) increases, reducing the error, the controller closes the valve
to reduce heating. Because the PID output and measured variable move
in opposite directions, the loop is reverse acting.
Figure 15: Heating a space
Error
Measured variable
(temperature)
Setpoint
Time
Temperature
As temperature ↓
actuator position ↓
so action is direct
Error
Setpoint
Tempe rature
Time
Measured variable
(temperature)
As temperature ↑
actuator position ↓
so action is reverse