



















Error deadband
CNT-APG002-EN 19
®
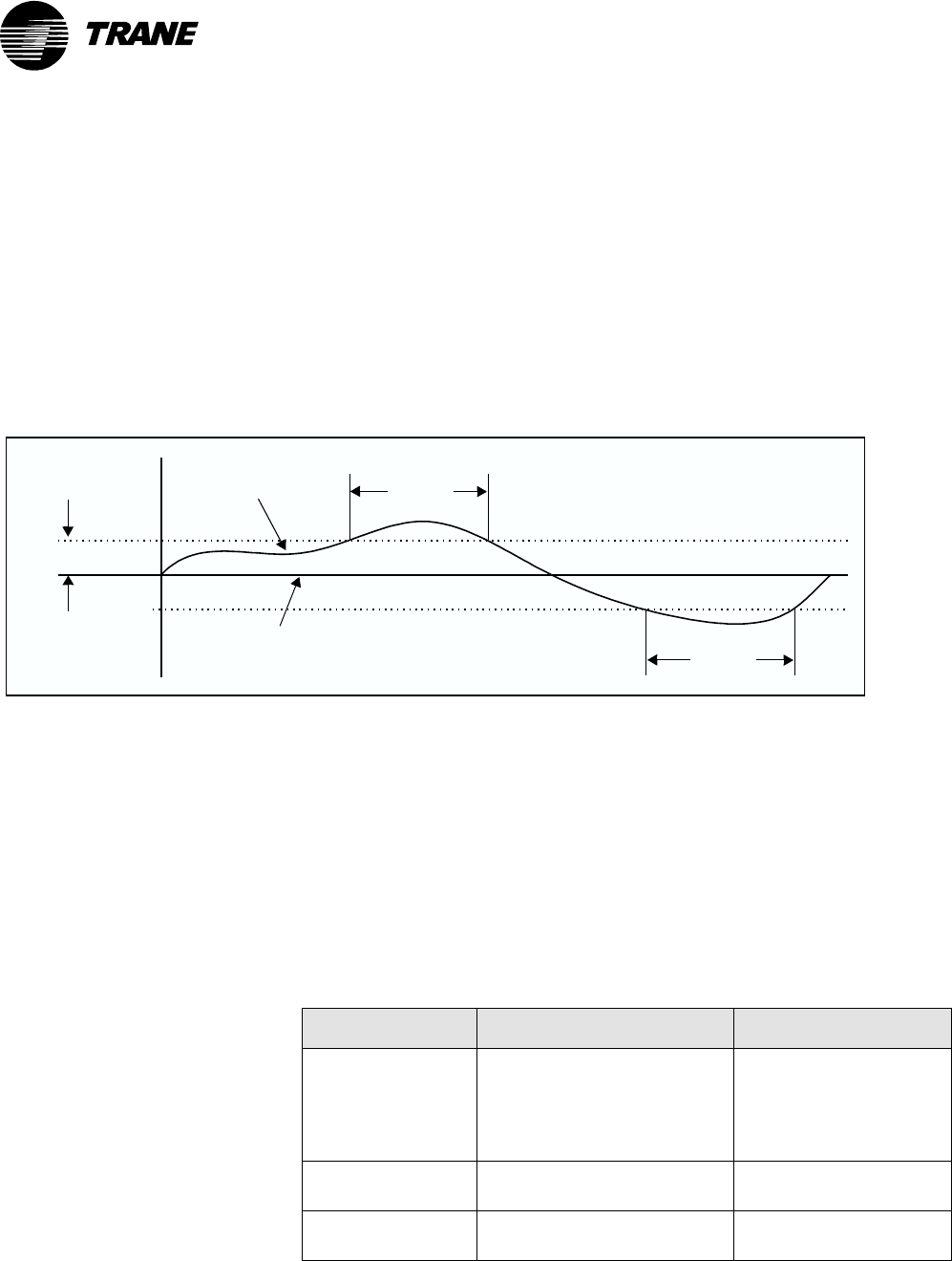
Error deadband
Error deadband is typically used to minimize actuator activity. It can also
be used to allow for some slack in system sensors and actuator mechanics.
Error deadband prevents the PID output from changing when the abso-
lute value of the error is less than the error deadband. For example, in
Figure 16 the error deadband is set at 2.0°F (1.1°C). As long as the abso-
lute value of the error is less than the 2.0°F (1.1°C), the PID output can-
not change. When the absolute value of the error exceeds 2.0°F(1.1°C),
the PID output can change.
Figure 16: Error deadband
Figure 16 illustrates the way that error deadband limits how often an
actuator is controlled. When a PID loop controls a chilled-water valve,
limiting control is not so important. But when a PID loop controls how
many stages of cooling are being used, it is important to limit equipment
cycling.
Typical applications
Table 4 shows reasonable error deadbands for several applications. The
error deadband can also be calculated as described in the following
sections.
control
control
Setpoint
Measured
variable
Error deadband
Error
Table 4: Error deadband settings
Application Suggested error deadband Notes
Modulating output
(analog or float-
ing point binary)
0.5°F (0.3°C) for temperature
0.01 in. wc (2.5 Pa) for duct
static pressure
1.0 in. wc (250 Pa) for build-
ing static pressure
Dependent on resolu-
tion of the measured-
variable sensor
Direct expansion
(DX) cooling
4.0°F (2.2°C) for temperature Staging application
Cooling towers—
fan staging
2.5°F (1.4°C) for temperature Staging application