Programming in TGP
CNT-APG002-EN 27
Follow these steps to program PID loops in TGP:
1. Use the Limit block to make sure that the setpoint is within reason-
able limits.
2. Run the PID calculation.
3. Define failure and other operation-dependent conditions.
Check for fan-status and measured-variable input failures. Program
sensible actuator positions or behavior for these conditions. To do
this, use the Default and Fail Safe fields in the PID Properties dialog
box (see Figure 18 on page 26), or use a Switch block for more complex
operations.
4. Control the analog output with the result of the calculation.
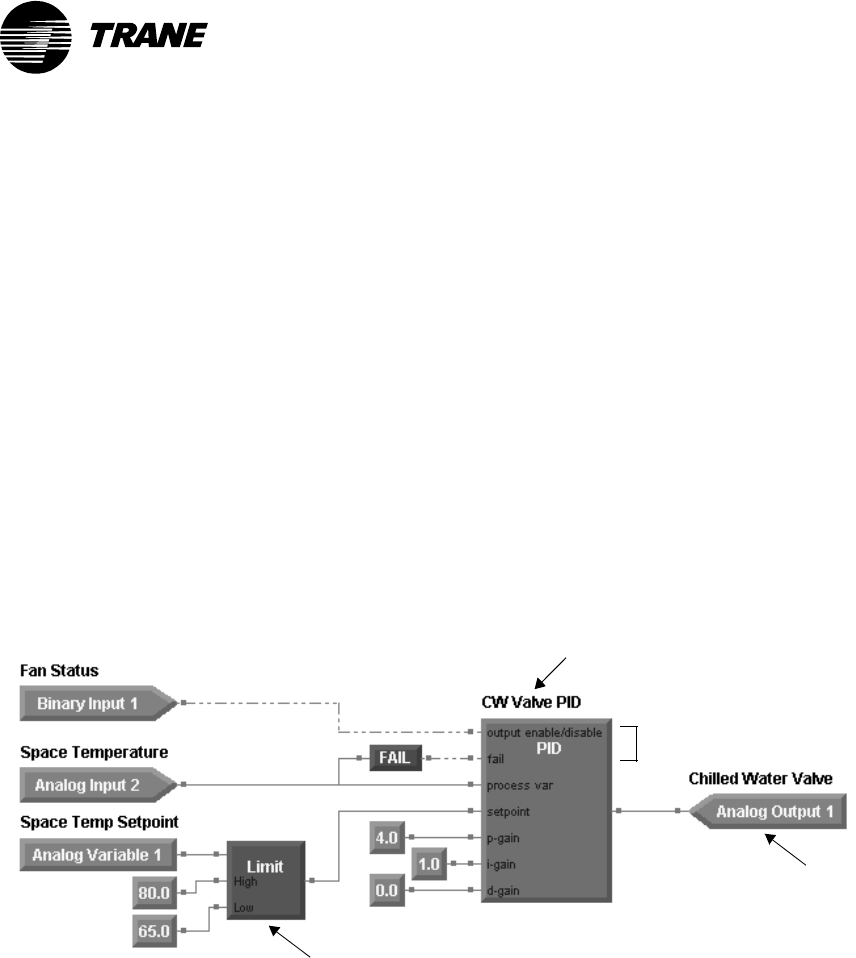
Figure 19 shows the TGP program for a simple PID loop controlling a
chilled-water valve. Compare the TGP program to the PCL program
shown in Table 7 on page 25. The Limit block accomplishes the same task
as the MIN and MAX operators in PCL.
Figure 19: TGP program
Step 1. Limit setpoint to
a reasonable value
Step 3. Define failure and
enable/disable conditions
Step 2. Run the PID calculation
Step 4. Control the output







































































