



















®
Chapter 2 PID settings
14 CNT-APG002-EN
Calculating the sampling frequency
PID loops are carried out by programs, such as process control language
(PCL) programs and Tracer graphical programming (TGP) programs.
Since the PID calculation occurs when the program executes, the sam-
pling frequency and the program execution frequency are generally the
same.
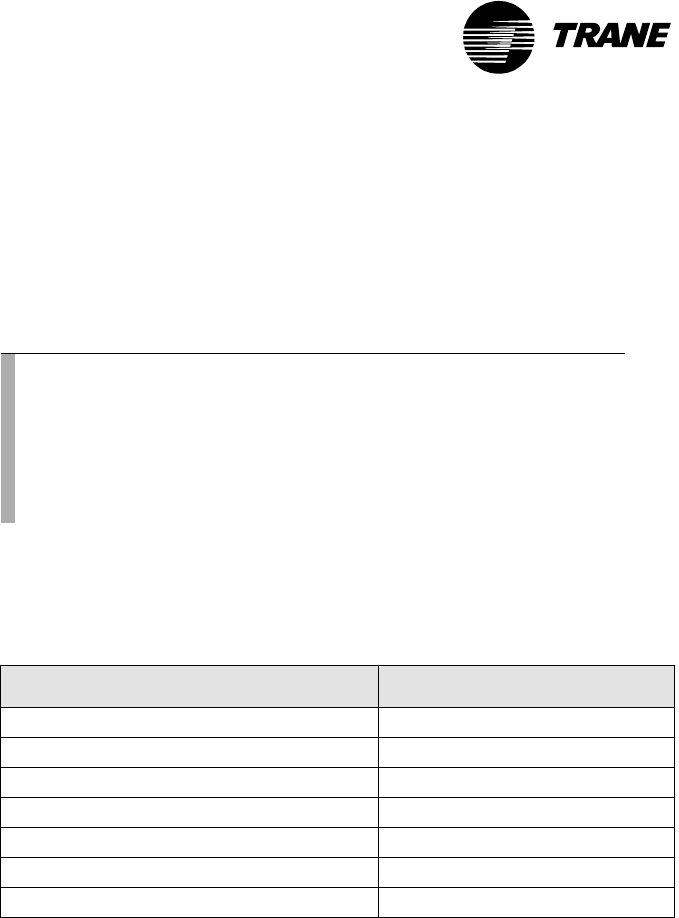
Table 2 shows recommended program execution frequencies for common
applications. These are good initial values, but it may take some trial and
error to find the best frequency.
You can also manually calculate the sampling frequency.
To calculate the sampling frequency:
1. Manually control the analog output to 0%.
For example, control a heating valve closed.
2. Record the measured variable when it stabilizes.
The temperature stabilizes at 70°F (21°C).
3. Manually control the analog output to 50% or 100%.
Control the output to 100% (completely opening the heating valve).
4. Record the measured variable when it stabilizes.
The temperature stabilizes at 120°F (49°C)
5. Subtract the measured variable determined in step 2 from the mea-
sured variable determined in step 4. This is the change in the mea-
sured variable.
120 – 70 = 50°F (49 – 21 = 28°C).
Note:
Tracer controllers have different approaches to using the sam-
pling frequency. For Tracer MP580/581 controllers, the sam-
pling frequency can be a multiple of the program frequency. The
Tracer AH540 controller has a pre-determined sampling fre-
quency. The Tracer MP501 controller has a setting for the sam-
pling frequency.
Table 2: Recommended initial sampling frequencies
Application Suggested execution frequency
Duct static pressure 5 seconds
Building static pressure 120 seconds
Discharge-air temperature 10 seconds
Space temperature (typical comfort zone) 60 seconds
Space temperature (high air change zone) 30 seconds
Duct humidity 10 seconds
Space humidity 30–60 seconds