



















®
Chapter 1 Overview of PID control
2 CNT-APG002-EN
How PID loops work
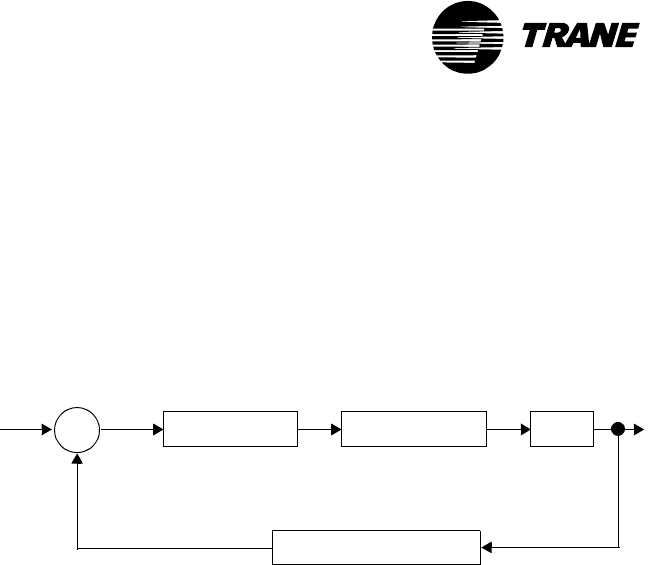
A PID loop performs proportional, integral, and derivative calculations to
calculate system output. Figure 2 illustrates how a typical PID loop
works. The sigma (Σ) symbol indicates that a sum is being performed. The
plus (+) symbol indicates addition, and the minus (–) symbol indicates
subtraction.
Figure 2: PID loop
In an HVAC system, the controller uses a PID calculation to change the
output of mechanical equipment to maintain some setpoint. For example,
if a space is too cold, the PID calculation controls an actuator to open a
hot-water valve some amount, increasing the discharge-air temperature
to heat the space.
In classic PID control systems, the controller reacts to a comparison
between a setpoint and a measured variable (also called the process vari-
able). The setpoint is often a user-defined setting, such as a room temper-
ature setpoint. The measured variable is the controlled element, in this
case the current room temperature.
The difference between the setpoint and the measured variable is called
the error, which is the value used to calculate system output. The error is
defined as:
Error = setpoint – measured variable
For example, if a room temperature setpoint is 75°F (23.9°C) and the
actual temperature is 65°F (18.3°C), then the error is 10°F (5.6°C).
The PID calculation uses the error to calculate an output that moves the
measured variable toward the setpoint as quickly as possible without
overshooting the setpoint. The output typically controls the position of an
actuator over a range of 0% to 100%. In the example above, an actuator
would open a hot-water valve some amount to increase the room tempera-
ture by 10°F (5.6°C).
The plant is the physical system, such as a room or a duct, that contains
the controlled element (the measured variable). The conversion function
converts the measured variable to the same units as the setpoint. For
example, a thermistor measures space temperature in terms of resis-
tance, which is then converted to a temperature by the analog input of the
controller.
Σ
PID calculation
Setpoint
Conversion function
HVAC equipment
Measured variable
(process variable)
Error
+
–
Plant