



















Sampling frequency
CNT-APG002-EN 13
®
Problems also arise from sampling too quickly. Some systems have natu-
rally slow response times, such as when measuring room temperature.
Slow response times can also be caused by equipment lags. Since PID
loops respond to error and changes in error over time, if the measured
variable changes slowly, then the error will remain constant for an
extended period of time. If the measured variable is sampled repeatedly
during this time, the proportional output remains about the same, but the
integral output becomes larger (since it is the sum of past errors). When
the control system does respond, the response is out of proportion to the
reality of the situation, which can destabilize the system. The control sys-
tem should always wait to process the result of a change before making
another change.
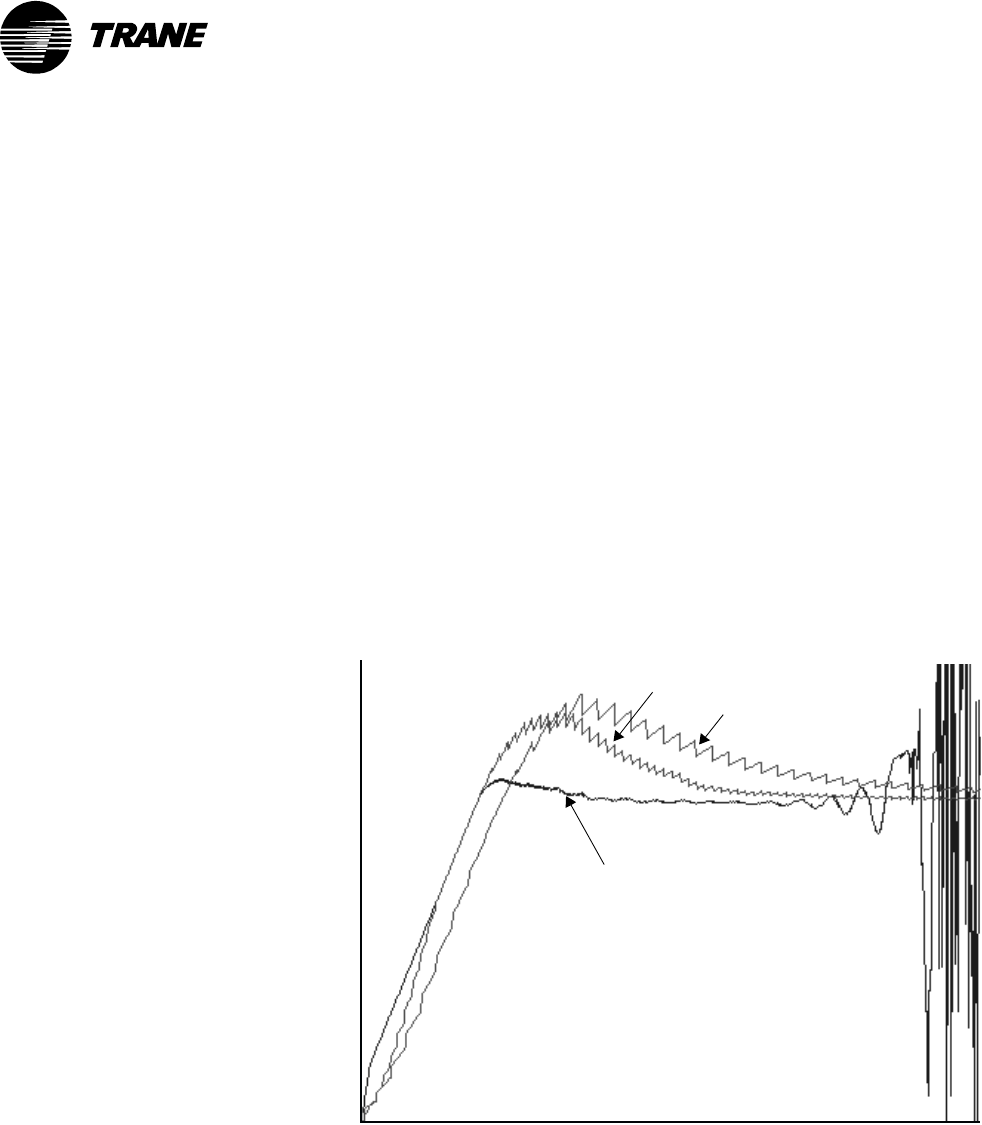
Figure 12 shows the measured variable when sampling frequencies are
too fast, acceptable, and barely acceptable. When the sampling frequency
is too fast (2 seconds), the measured variable begins to oscillate and
finally destabilizes because the PID loop output drives the actuator to
extremes. When the sampling frequency is slowed to either 10 or 20 sec-
onds, the system remains stable once setpoint is reached.
Figure 12: System stability with different sampling frequencies
Sampling freq. = 10 s
Sampling freq. = 20 s
Sampling freq. = 2 s
(system destabilizes when
sampling freq. is too fast)
Time
Measured variable