



















CNT-APG002-EN 1
®
Chapter 1
Overview of PID control
This guide will help you set up, tune, and troubleshoot proportional, inte-
gral, derivative (PID) control loops used in Tracer controllers. These con-
trollers include the Tracer MP580/581, AH540/541, and MP501
controllers. This chapter provides an overview of PID control.
What PID loops do
A PID loop is an automatic control system that calculates how far a mea-
sured variable is from its setpoint and, usually, controls an output to
move the measured variable toward the setpoint. The loop performs pro-
portional, integral, and derivative (PID) calculations to determine how
aggressively to change the output.
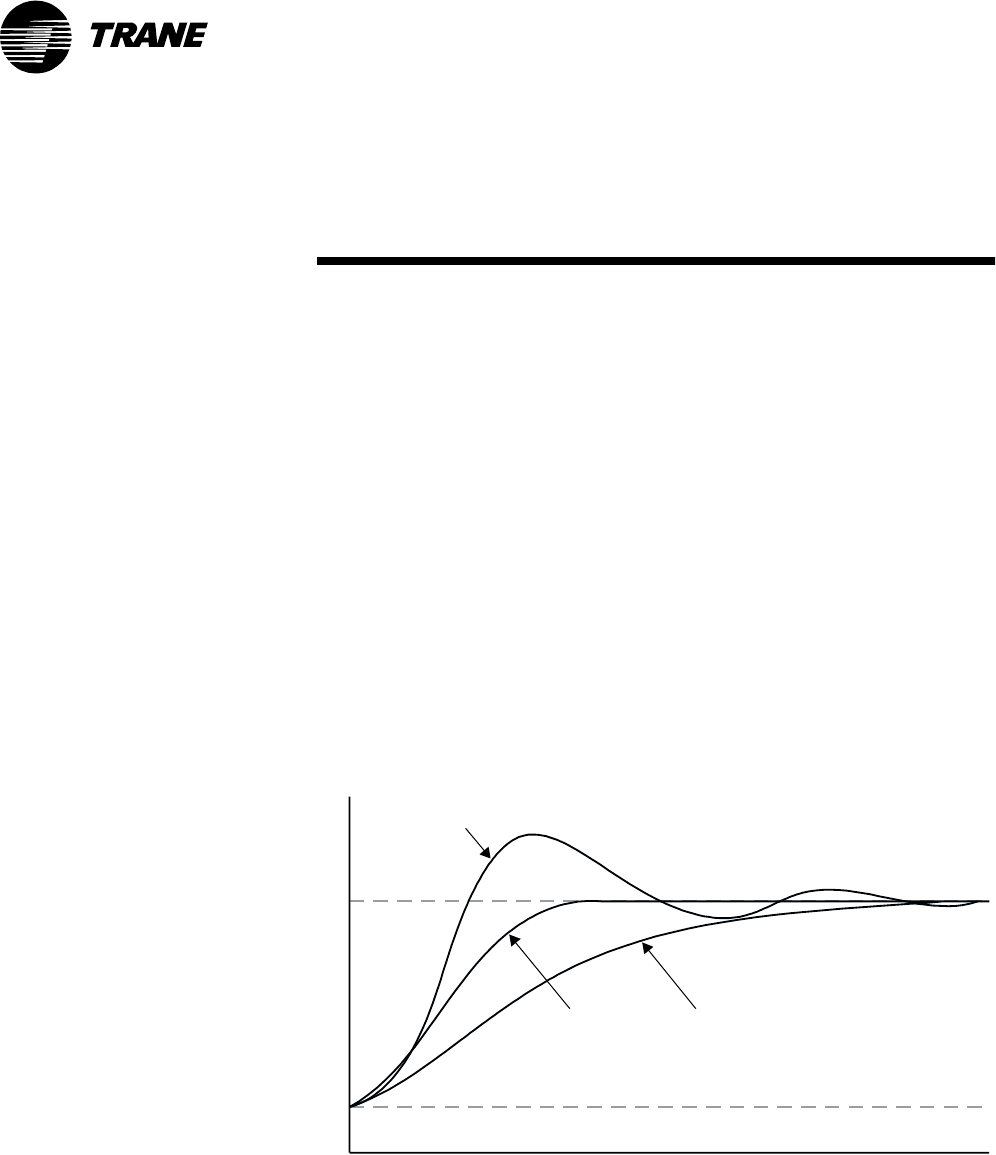
The goal of PID control is to reach a setpoint as quickly as possible with-
out overshooting the setpoint or destabilizing the system. If the system is
too aggressive, it will overshoot the setpoint as shown in Figure 1. If it is
not aggressive enough, the time to reach the setpoint will be unacceptably
slow.
Figure 1: The effects of PID aggressiveness
In the heating, ventilating, and air-conditioning (HVAC) industry, PID
loops are used to control modulating devices such as valves and dampers.
Some common applications include:
• Temperature control
• Humidity control
• Duct static pressure control
• Staging applications
Setpoint
Initial point
Too aggressive (overshoot)
Too slow
Time
Ideal response
Measured variable