



















Building pressure control
CNT-APG002-EN 33
®
Table 12 lists the settings for the PID loop controlling building pressure.
The sampling frequency is slow because building pressure changes slowly.
For programs written in PCL, the error deadband is 1.0, which is equal to
100 times the minimum resolution of the pressure sensor.
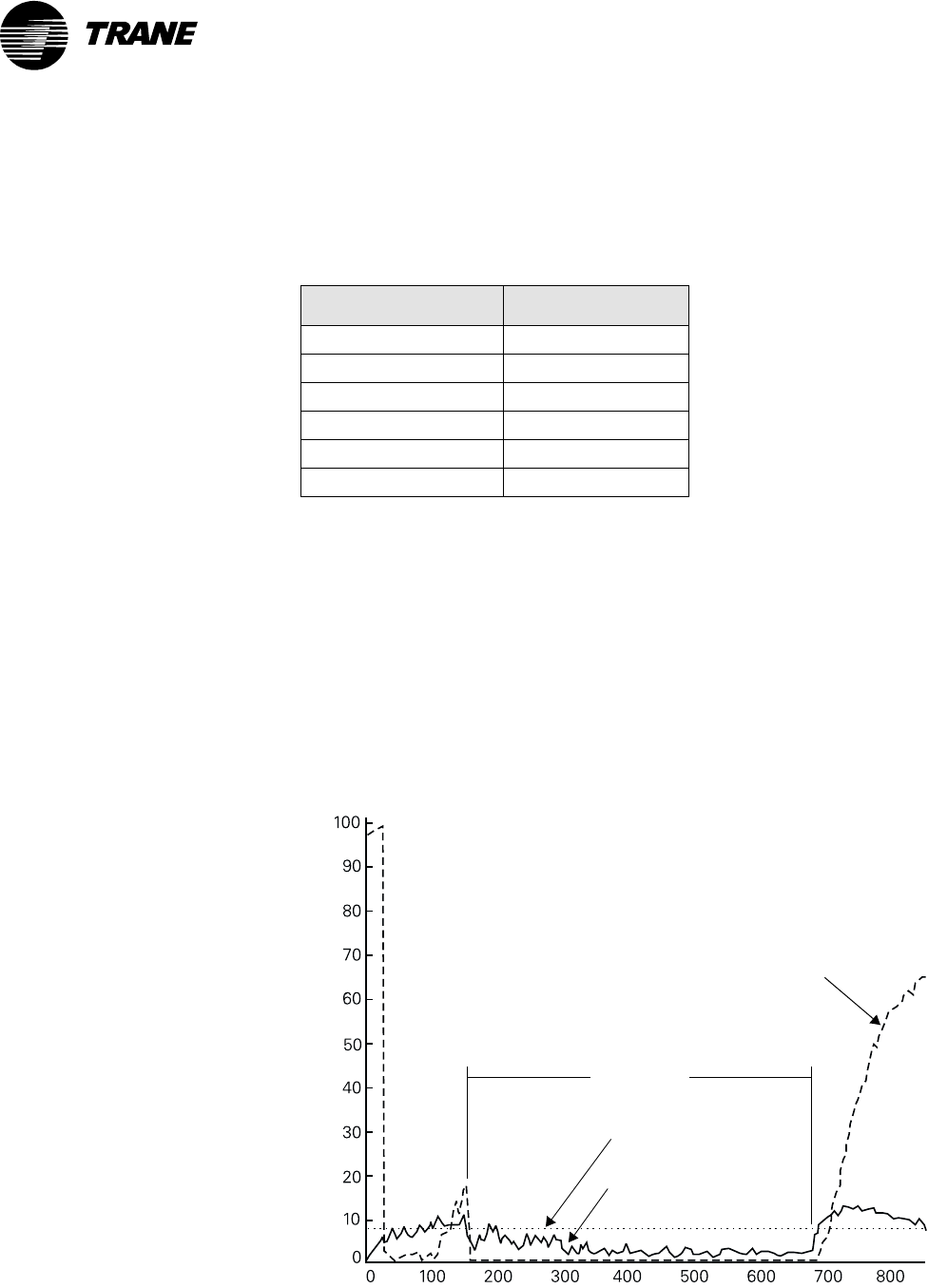
Figure 23 shows system response over a 14-hour period. During the unoc-
cupied period (from 150 to 650 minutes) a different type of control, which
decreases pressure, is being used. After the control mode changes from
occupied to unoccupied, the PID loop still attempts to increase space pres-
sure by closing the relief damper.
When the space is again occupied, the rapid change in the damper posi-
tion indicates that the system is being aggressively controlled.
You may find that during occupied operation, the relief damper is con-
trolled to a fully open position. This is usually the result of pressure in an
adjacent space influencing pressure in the measured space.
Figure 23: Space pressure and damper position
Table 12: Settings for building pressure control
PID setting Initial value
Proportional gain 4.0
Integral gain 1.0
Derivative gain 0.0
Error deadband PCL: 1.0, TGP: 0.01
Action Direct
Sampling frequency 2 minutes
Time (minutes)
Space pressure and valve position
100 × space pressure
setpoint (in. wc)
100 × space pressure
(in. wc)
Relief damper
position (%)
Unoccupied